


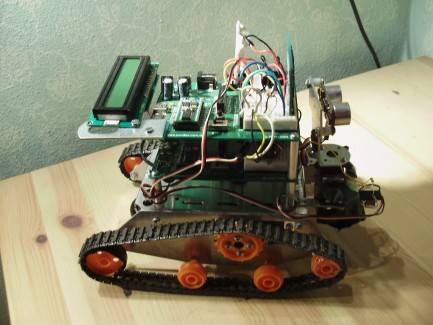
ABBot: Advanced Boe Bot
The main goal of this project was to develop an autonomous rolling robot, based on Parallax Boe-Bot, but using two boards and microcontrollers.
- It uses only standard, relatively cheap, Parallax parts (Board Of Education boards with Basic Stamp 2 microcontroller and several sensors and actuators).
- It can communicate with the user by:
* Displaying information on its Serial LCD.
* Talking through a TTS (Text To Speech) device.
- It may be given a goal to be reached:
* Photophile (search for a place where lighting is above a certain level)
* Photophobe (search for a place where lighting is below a certain level)
- It can move around by using wheels or the Boe-Bot Tank Tread Kit.
- It can detect obstacles by using an Ultrasonic Range Finder.
- It can avoid falling downstairs by using an Infrared Emitter and Receiver.
- It can stop and change direction when its horizontal or vertical inclination is too steep.
- It can detect temperature and humidity.
- It can display, at user request, all its sensors info.
Here is a detailed documentation: http://www.robotinfo.net/pdf/ABBot%20Advanced%20Boe%20Bot%201_0.pdf
Autonomous rolling robot, based on Parallax Boe-Bot, using two boards and microcontrollers.
- Control method: Full autonomous
- CPU: Basic Stamp 2
- Power source: 4xAA batteries
- Programming language: pbasic
- Sensors / input devices: accelerometer, TTS, Ultrasonic Range Finder, Thermometer
- Target environment: indoor