



A Total Rebuild
With my new-found knowledge from my last test base comes the new tail-dragger!
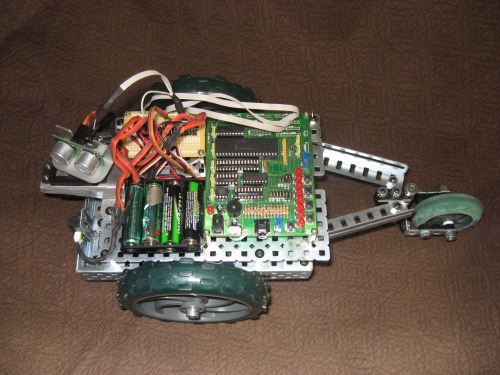
This robot is built from VEX parts using my own brain, servos and custom parts. As mentioned above, this unit was a 4-wheel job which served it's function as a HUGE learning experience. Now that I feel I have solidified all the seperate componants, I decided to do a full rebuild, clean-up and upgrade. As follows:
Upgraded from the standard 28x board to a picaxe 40x1
Seperate servo-connection-only conection board (with room for other custom circuits)
Includes a darlington, motor driver and bigger 24LC256 EEPROM (for "mapping" ability)
Extra on-board input buttons, pots and speaker not to mention LED indicators for all outputs
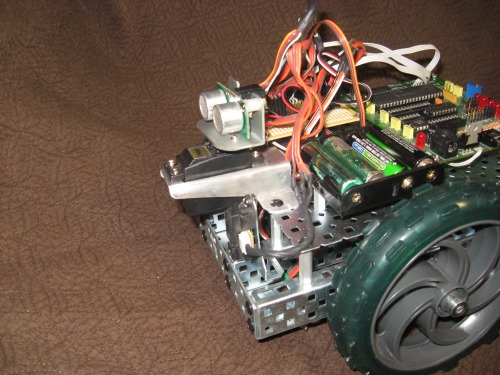
Optional LCD 14-pin out and i2c out LCD
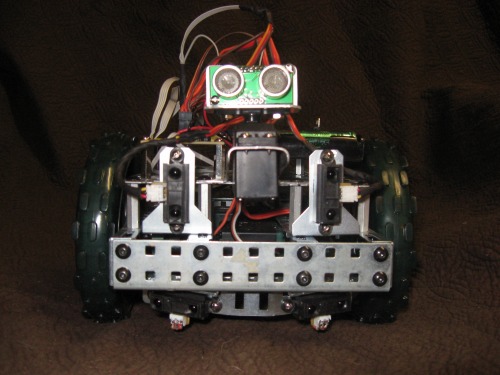
4 Sharp IR distance sensors plus standard sonar
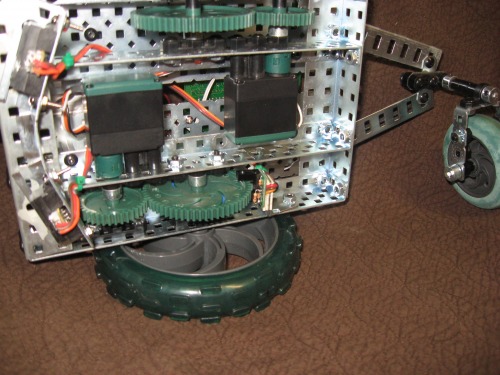
Lower gearing but still faster overall speed with larger wheels
Better "climb over stuff" ability
Tail-drag for less spin resistance
New "cleaned-up" distance encoder
Upgraded custom-made servo bracket and sonar mount (Tell me those brackets aren't sexy!)
As you can see, I think I have cleaned-up and solidified the whole base. Currently I am working on re-coding all of my old code snippets (basic moves, encode count, sonar and IR distance checks) to work with the new input and output pins. When I write code I like to have all the basic chunks of code pre-written so I can copy and paste instead of rewriting all the stupid things you use over and over like the basic Forward, Back, R and L moves. I hope to have all the basics down soon and look forward to moving on to some silky-smooth navigation using the 5 distance sensors I now have. In theory, I hope to have the 4 IR sensors cover the majority of navigation leaving the sonar to sweep looking for interesting stuff to direct the robot toward. All in all I am stoked with the new assembly and can't wait to get into the meat of the coding!
--Did you notice the sexy-sexy new custom-made servo and sonar mounts?!?!?
Navigation and Mapping
- Actuators / output devices: 2 Servos for Drive
- Control method: IR remote and autonomous
- CPU: PICAXE 40X1
- Power source: 4 AA
- Programming language: Basic
- Sensors / input devices: 4 Sharp IR's 1 Sonar on Servo