


A.P.O.S.T.O.L.
A.P.O.S.T.O.L. is short for Armoured Prototype Of Systematic Takeover Of Land. It doesn't make much sense, but when me and my robotics group were thinking of a name this seemed like a good idea.
He is a Hexapod. Or he should be one when he's finished. For now it's just one leg and alot of brains. He will use intellibrain board as a main platform becouse we have 4 of them in robotics clubs, and we can't buy expensive boards, and diy arduinos don't have enough pins for everything. It will use 3 arduino severinos (2 of them are finished now), to control the legs, and each will do trigonometry calculations so the main board will have to do less.
Plan is to make it walk, and then add a bunch of sensors and some "AI". The biggest problem was servo control. I solved that problem today, now the biggest problem is getting servos, we need strong ones so it can carry everything, and they are quite expensive (30$ a piece for 20 motors isnt much, but 33% tax+customs, and last time when we ordered stuff the charged tax and customs for double the price of the products), and we don't know when we will be able to afford them if the club doesn't pay for them.
The leg is made from polymorph for now, but final version will be made from plexy and iron parts, we want it to be able to climb trees. Joints will probably stay from polymorph. It's awesome stuff for prototyping, but you all know that allready.
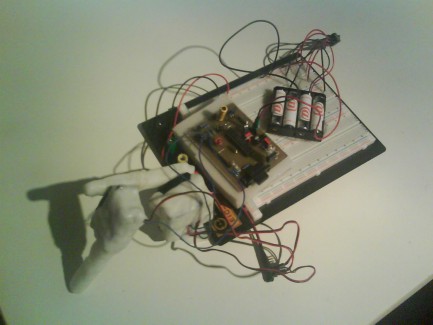
Breadboard is used for now just to wire up the power, later it will have a regulator board for only power regulation.
I don't know what else should i say about this, so i will just post some pictures here. I made a video too, but it was upside down and i don't have any editing software so i will record another video tommorow probably.
________________________________________________
Update, 4.11.2010.
I made a video of A.P.O.S.T.O.L. writing LMR with pen attached to his leg. I am holding it becouse the base of the leg is just made for testing and doesnt hold it firm enough so sometimes the base moves instead of the rest of the leg.
Thank you for reading.
nothing yet, soon it might walk
- Actuators / output devices: 3 servos for now, atleast 20 in the end
- Control method: Autonomus
- CPU: 3 arduinos and one intellibrain board
- Programming language: c and java
- Sensors / input devices: none yet, paralax ping and IR compound eye when it's assembled
- Target environment: Indoor or outdoor