


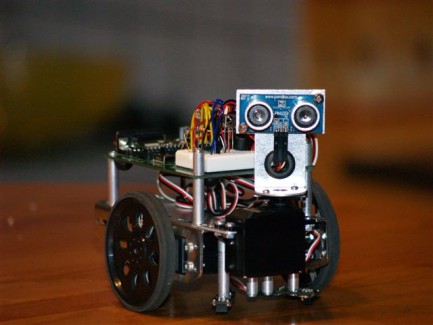
a BoeBot with no name
Second-hand BoeBot
With the whole 2K eeprom and the luxury 13 words RAM
Fitted with the Ping, a compass, the quad QTI kit (2 used as kindof wheels encoders)
+ all the std Parallax accessories
Currently just roaming, go to the nearest object, and trying to track with the ping
update: now with IR Remote Control (don't know yet what it could be used for...)
update: new ultrasound cartography (uses trigonometry to calculate distances between multiple objects)
update: new 'go to the closest object' algorithm using the compass
update: now controlled by Microsoft Excel --> "ping grapher" to discover that the Ping))) should wear some glasses (see 4th video) (connection with mscomm32.ocx) // OCX and XLS file (attached)
to use the XLS file, first find and register the MSCOMM32.OCX file
roam with no specific goal...
- Actuators / output devices: futaba servos (parallax branded)
- Control method: autonomous / IR remote / PC / Microsoft Excel
- CPU: Basic Stamp
- Power source: 5x AA 1.2V
- Programming language: pbasic 2.5
- Sensors / input devices: IR, Line sensor with 4 IR photodiodes, Parallax Ping))), hitachi compass
- Target environment: indoor