



UR-type mechanical structure
- Equipped with myCobot280 collaborative robotic arm and HD camera.It realizes the integration of robotic arm, vision and control.
- Adopts UR-like robot configuration. Compared with other types of robotic arms, it has a larger range of activities and more accessible points.
New Generation Jetson Orin
Yahboom provide three configurations for choice:
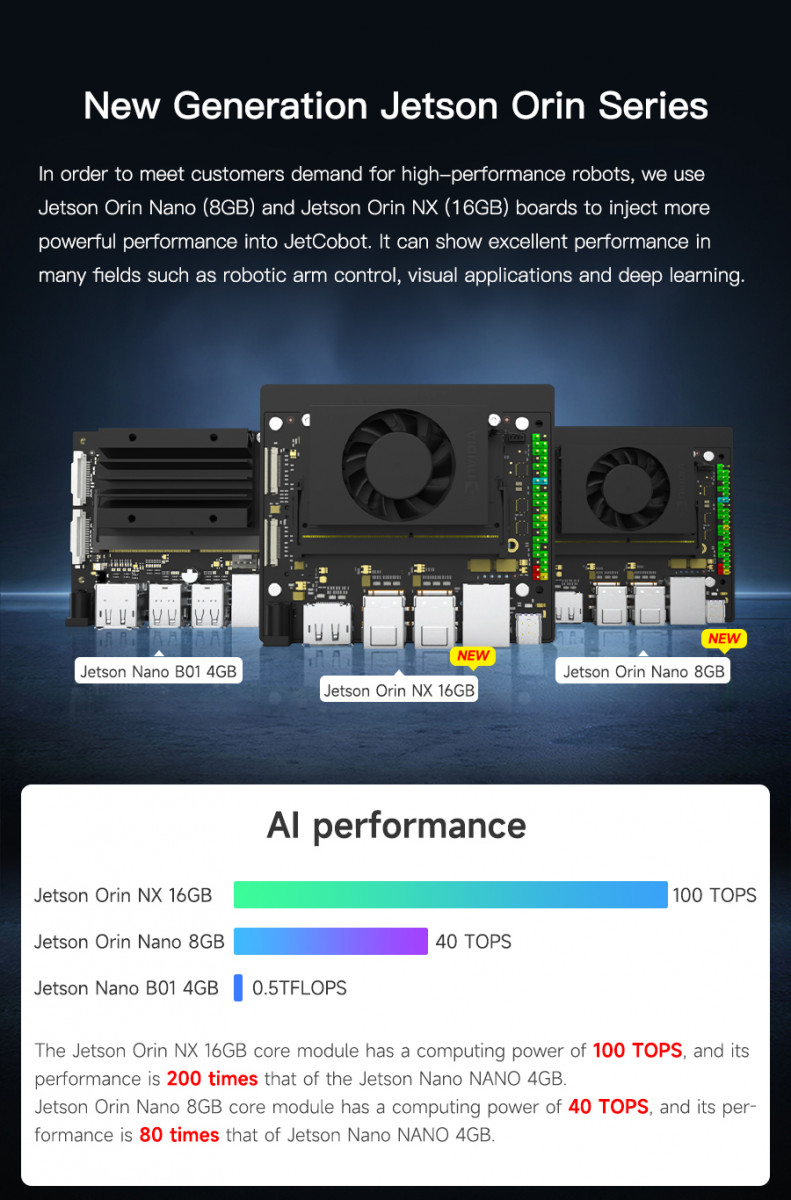
Note: The course materials, functions and control software of the three versions are the same. Different versions only affect the performance of JETCOBOT.
Please refer to the following image for the performance of the three development boards.
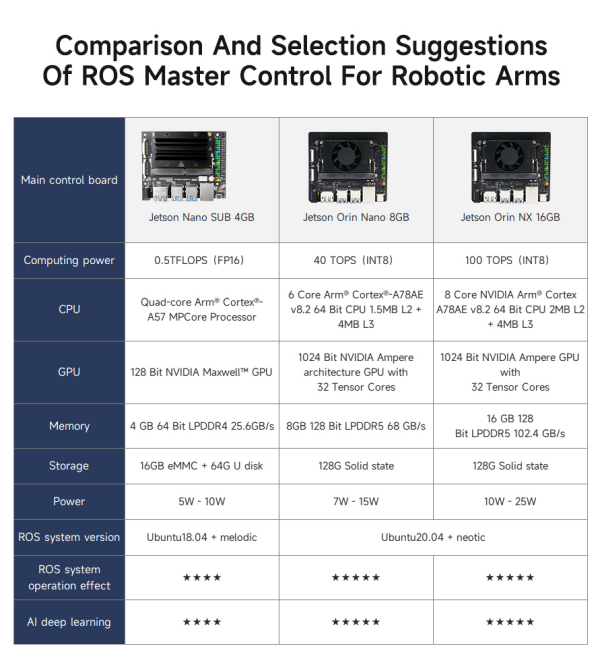
Tips: We recommend users to choose the version with Jetson ORIN NX 16GB, which has better motherboard performance and smoother operation of some complex AI visual recognition and simulation functions.
Based on (ROS) robot operating system
- Supports multiple programming languages.
- Provides rich development interfaces, Python driver libraries and built-in ROS environment to make your development easier and faster.
- Detailed MoveIt tutorials will be provided, and perform robotic arm control and validation in the RVIZ simulation environment.
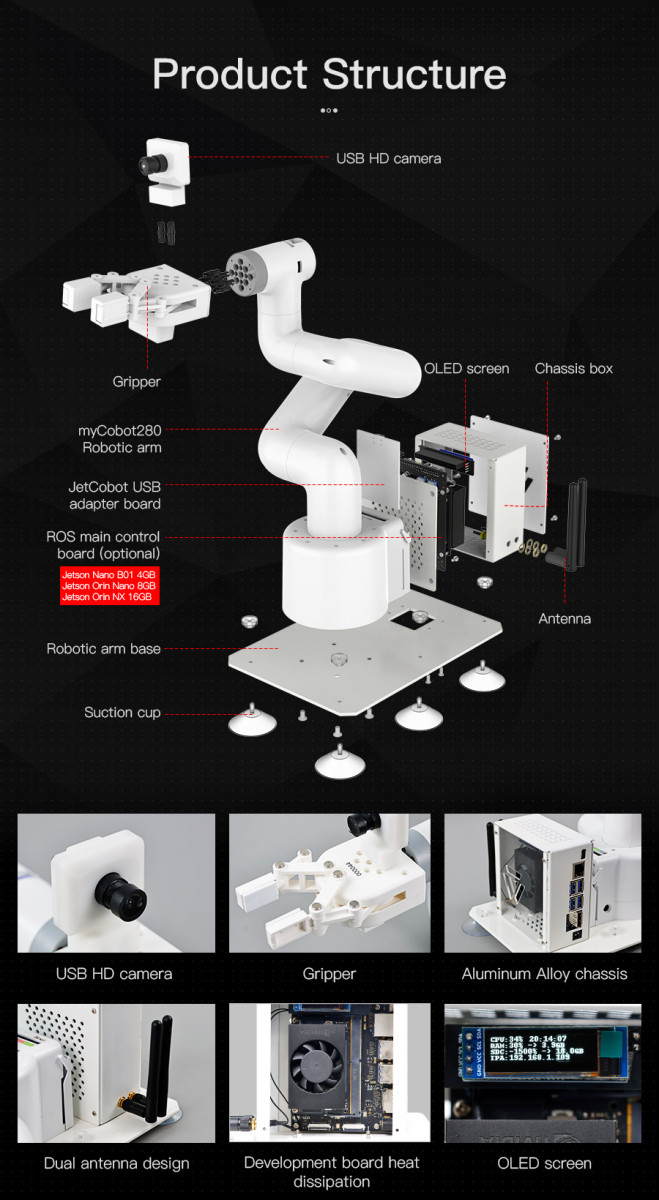
JetCobot is mainly composed of MyCobot280 robotic arm, gripper, USB camera, Jetson metal chassis box.
◆◆◆ MyCobot280 robotic arm
MyCobot280 has a maximum effective arm span is 270mm.
Add gripper maximum effective arm span is 374.5mm.
Repeat positioning accuracy of ± 0.5mm.
It adopts a configuration similar to the UR robot, flexible movement.

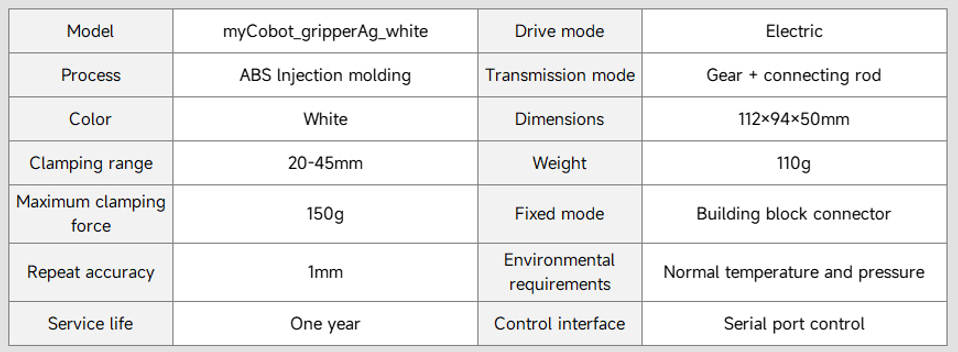
◆◆◆ Gripper
The gripper is driven by a motor and the speed can be controlled, which can minimize the impact on the clamped object. The positioning point is controllable,the clamping is controllable, and the gripper can firmly grasp the object, not easy to fall, and easy to operate.
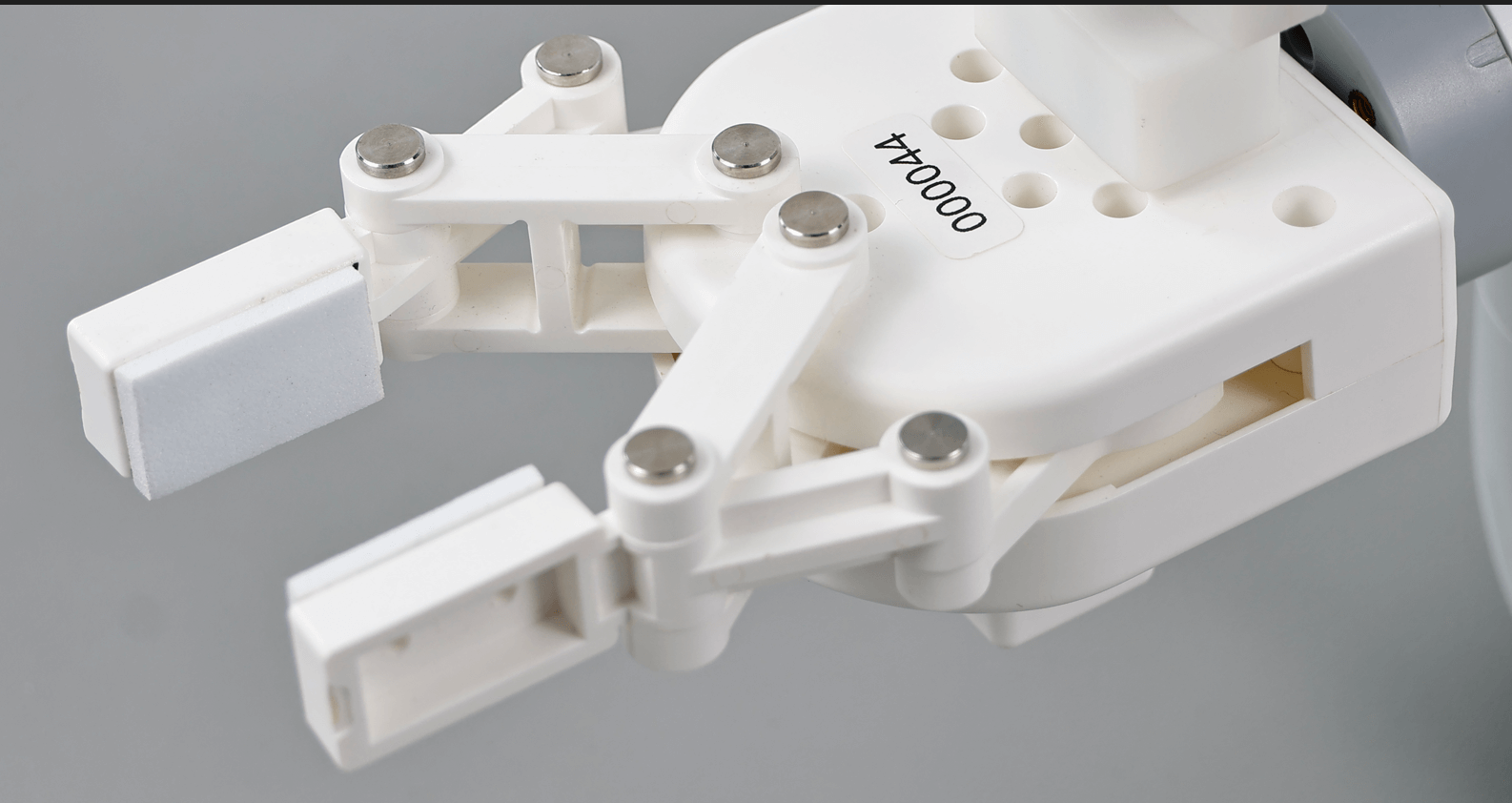
Gripper parameters are as follows:
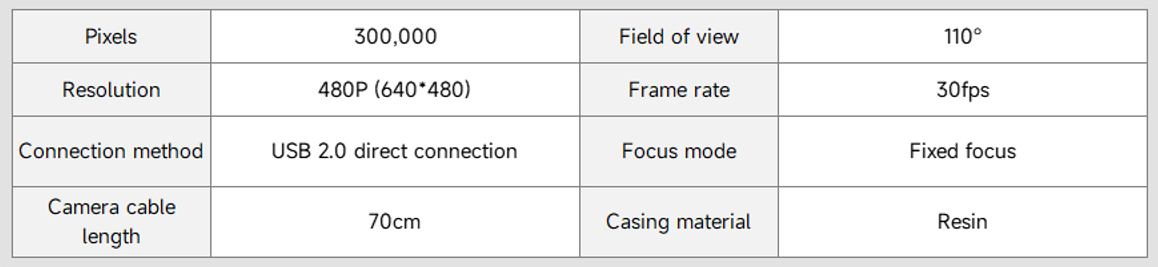
◆◆◆ USB camera
The USB camera on the robotic arm with 0.3MP,110° field of view, 480P resolution, and 30fps frame rate, which can provide HD image acquisition.
USB camera parameters are as follows:
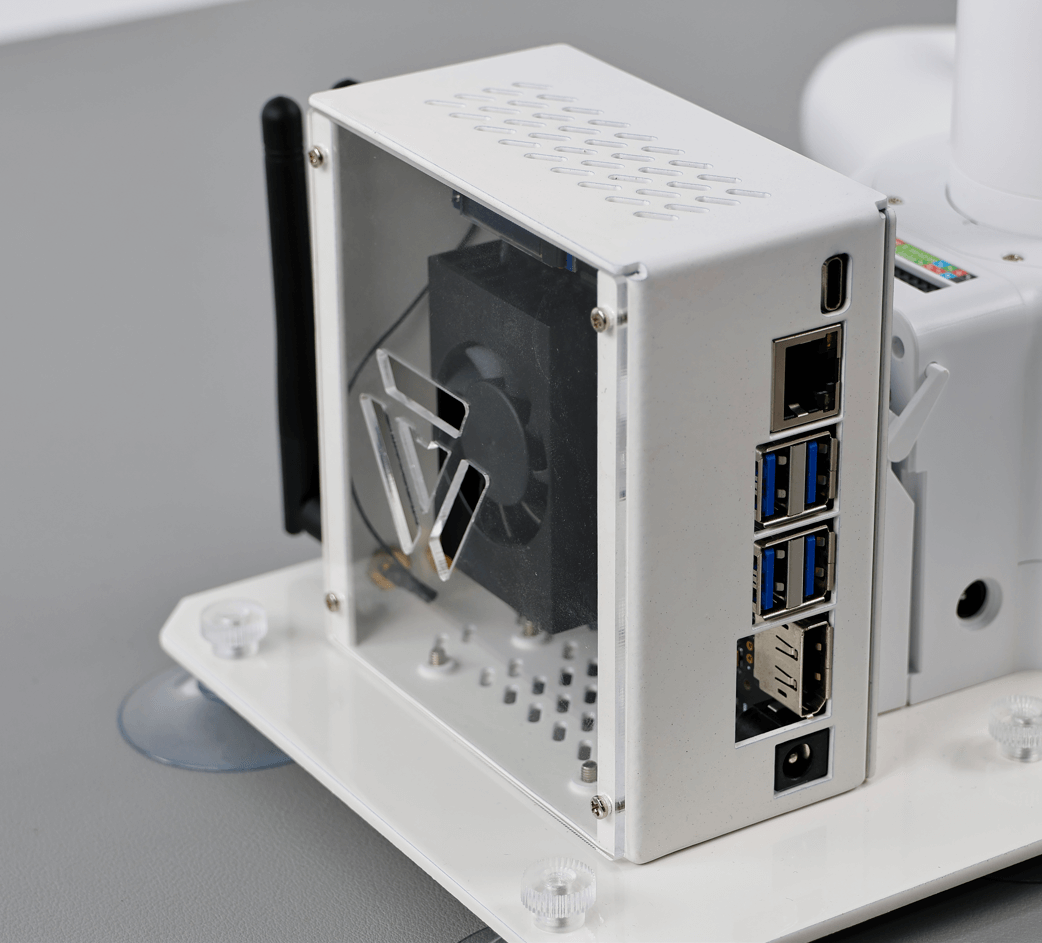
◆◆◆ Chassis box
The overall shell is made of metal material, and the gaps on the side correspond one-to-one with the interface of the Jetson development board, protecting the development board while not affecting any other external devices.
Adopt transparent acrylic material on the front, allowing users to observe the operation status of Jetson development boards at any time.
●●● Deep learning | Garbage recognition
The high-definition camera equipped on JetCobot captures images of garbage items, which are then fed into pre trained deep learning models for analysis. Based on the extracted features, JetCobot can determine which category the garbage belongs to, such as apple cores, used batteries, books, or hazardous waste.
●●●Garbage sorting and stacking
JetCobot accurately identifies the type of garbage, and the robotic arm immediately performs sorting actions based on the classification results, picking up the garbage to the correct recycling point or stacking the same type of garbage.
●●●Visual recognition | Target tracking
Through high-definition cameras, JetCobot is able to understand and respond to its surrounding environment, combining AI visual recognition and target tracking functions to achieve a series of complex and precise operations.

●●●MediaPipe developement | Deep learning
By integrating the MediaPipe machine learning framework, JetCobot can not only perform basic grasping and placement tasks, but also demonstrate high adaptability in more complex scenarios.
●●●Inverse kinematics algorithm | MoveIt simulation control
JetCobot supports Movelt simulation, which enables mechanical control and algorithm validation in virtual environments, reducing the requirements for experimental environments and improving experimental efficiency;
Users can directly control each joint of the robotic arm in the simulation environment, preview the motion of the robotic arm in the virtual environment, including the extension and rotation of joints and the position and posture of end effectors.
We provide three control modes for JetCobot. As shown below.

Jetcobot is equipped with myCobot280 collaborative robotic arm and HD camera, which can accurately identify objects such as color, face, and human posture.
By calculating the position of objects through geometric relationships, it can perform precise positioning, grasping, tracking. Yahboom also provides a map, 8PCS building blocks and a checkerboard paper. Users can use it to perform color sorting, garbage sorting, garbage stacking, etc.
Support Jetson Nano B01、Jetson Orin Nano 8GB、Jetson Orin NX 16GB. Combining TensorFlow and PyTorch, as well as YOLOv5 model training, it provides a comprehensive set of visual algorithm application solutions.
Covers visual algorithm application tool sets such as OpenCV, Mediapipe, Apriltag, and Jetson-Inference. By integrating ROS robot system and inverse kinematics algorithm, the complex motion control of the robotic arm has been simplified. It can achieve coordinate control, motion planning, collision detection, and picking and sorting. Provided a flexible platform for ROS education and research.
Detailed MoveIt tutorials will be provided, and perform robotic arm control and validation in the RVIZ simulation environment. JetCobot is a good choice for the fields of education, development, and research.