



6 Legged Tiny Robotic Spider
Hi LMR people!
I'm building a little hexapod, just for fun. It uses 3 tiny 3g servo's (from ebay). all the legs are constructed using the inside of terminal blocks. For making a link between 2 of them you can easily cut off the head of a screw.

I used double sided tape to put everything together. tough I still needed one tire-wrap.
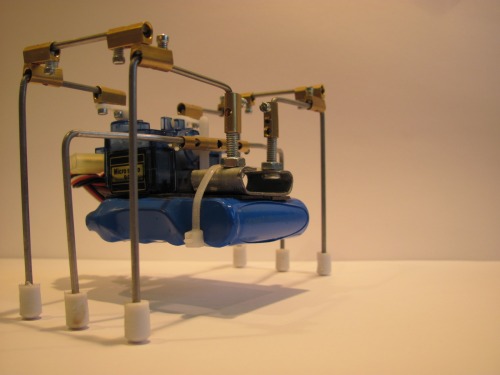
everything is placed onto a 4,8 volt accu pack, making the body.
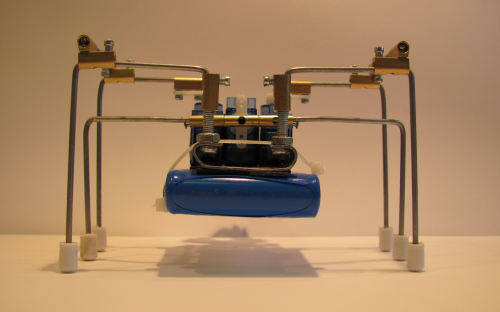
I will ad a PIC micro-controller, probably a 16f628A. For obstacle avoidance I will add 2 IR leds and an TSOP 1738 infrared receiver.
Next to my 2 more bigger robots i liked to have a smaller robot wandering my desk. Hope you like it..
Walks around using 3 micro-servo's
- Actuators / output devices: 3 micro servo's
- Control method: autonomous
- CPU: Pic microcontroller
- Power source: 4.8VDC battery pack
- Programming language: Picbasic Pro
- Sensors / input devices: 2 infra-red eyes
- Target environment: indoor and outdoor