


6 DOF Robot Arm
Hi :)
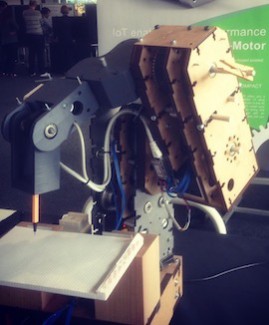
May I introduce my 6 DOF Robot arm here?
Mechanics: Its all out of laser cutted wood, steel and 3D-Printed Plastic (ABS)
Motors: The motors are HDrive17s. Please have a look at my running Kickstarter: http://kck.st/2gal6IG
Speed Reducers: I used time belts with HTD profile. The belts have hardly any backlash and are cheap. It is amazing how stiff the robot got. At the 2-4 Axis we have about 20Nm torque, the last axis have about 1Nm.
Programming: The programming has been done in c#. The inverse as well as the forward kinematic is calculated every millisecond. The pgrogramm is running on my desktop PC and is commanding the Ethernet Motors. You just have to send the target positions of each axis, the motors are doiing the rest.
What do you think?
Cheers,
Chris