


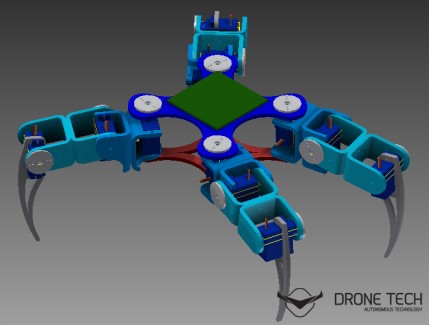
4P - Quadruped prototype
4P is a small quadruped robot designed to teach more complex mobility functions with the use of inverse kinematics and stabilization algorithms.
{kind=link}
The concept behind 4P is that it has to be build with the resource of a CNC and some other basic tools and be cheap enough to be used as a disposable platform for teaching and learning. Based on the original design we arrived at the following specifications:
- 3mm Acrylic parts
- 12 mini servos for 3DOF per leg
- small arduino based board
- light weight battery (lithium or equivalent)
- RF communication for debug and basic sensor feedback
It is still at a very early design stage, since we are working on another major project, but we are happy with our development so far to share it with the community.
moves around
- Actuators / output devices: 12 mini servos
- Control method: autonomous, RF
- CPU: ATmega328P
- Target environment: indoor