



3BOT
7/12/14 Update:
New video showing his head and remotely controlling via USB Serial (will be updated to run off the phone eventually)
Got a phone mount for him and added a "head" to the top of the servo bracket. The pan/tilt servos are barely strong enough to hold the phone and move it without issues so i'll probably be replacing them (see the video). I found Spydroid for android which is an awesome open source application that turns your android into an ip camera with an http browser based interface. It also allows you to play back sounds through the phone as well as set volume and other device hardware on the phone (flash, vibration etc.). I'm using it as a base for my application and will be modifying everything else. I'll also eventually be setting up control through the application so i can control it over wifi. The sounds I added to the app are: Dalek Exterminate, and some r2d2. The original app had farting, snoring and the cat and dog that i left in (see the video)
The head is super shakey right now... i need better servos i think, and i'm looking at picking up some metal gear high torque servos because the phone is too heavy for the little plastic servos. Also you can see the shakey head thing going on in the video.
I also have a new battery holder that isn't installed yet (you can see the wires for it hanging off the back)
Links:
Phone mount for samsung galaxy s4:
(its so easy to mount because of the mounting system for the gooseneck it comes with)
Spydroid source
Spydroid in google play store

7/3/14 Update:
Decided on a method of adding a platform to the back above where the battery pack will go. I used painter's tape to make a template of the back of the robot chassis then scanned it in, then duplicated it in inkscape as an svg. I added the size of the battery pack and allowed for wire passes etc. I'll use this template to mark where servos and other attachments can go. I printed a copy of this template and cut it out of some recycled plastic i had laying in the shop to make a quick dirty prototype of the final product i think i'll have laser cut by a friend of mine. I plan on putting sides of some type on this too so this is just to get a feel for any issues to plan around before final cutting. The plan is to be able to build mutliple "tops" for the platform that can be used for different things. the first will be a pan and tilt kit to mount either my phone in and or reversing for a nerf gun/weapon of some sort. Hoping to get time tomorrow to solder header pins for the pan/tilt and hopefully mount a battery pack (if i can find a spare one around my workbench)


7/1/14 Update:
Got some basic code up and running on the robot. It was having problems turning with the back wheels (2x wheels in back) which i figured would be an issue earlier on. I have a couple casters to try on it but in the mean time i wanted to get it moving. I saw OddBot's excellent suggestion on this post and decided to give a ping pong ball a try since i had some lying around. It works like a charm! It will even drive on the thick carpet in the living room with this configuration so i'm happy with it for now.
I have a lot more I want to do to this thing, but at least now it moves. Posted a new video as well.
6/27/14 Update:
Got the board headers soldered for the 2 Servos, US Sensor, and I2C (for expansion like adding a pan/tilt nerf turret or phone mount or gripper arm etc). I still have some headers to add for lights, and a backup sensor (maybe edge detection too, not sure yet.)
Wrote and EXTREMELY basic firmware for it and tested it. (Check the youtube video for the 1st test run).
I have a LOOOOONG way to go, but at least i got past the big hurdle of getting it running. Now its only uphill from here.
6/26/14 Update:
I have been pretty busy working on work and a few other projects recently so i haven't made much progress so far. I recently sprayed the orange body down with white krylon to get it looking more like what i want. The paint job didn't go so well, i need to sand it down and redo. I also drilled holes for a Ultrasonic sensor in the front of the truck's "Grill"
Here is how it currently looks:

I'm still thinking about putting a pan/tilt on top or on back to add some kind of weapon like a nerf gun or rubber band gun or something. Also I may put some LED's for "eyes" or something in the "glass" area or otherwise remove the "glass" and replace with something semi-transparent to allow LED light through.
6/10/14 Introduction:
A new robot i'm working on (one of several ongoing projects). I started this back in December then dropped it because I had a lot of other projects I started working on. I decided to go back to it since I wanted to throw something simple together quickly and i was tired of it just sitting there doing nothing.
The chassis is an old broken toy my son had. I usually scout out my kids' toys and call "dibs" on them if they break for parts or for a body for something. This is one i've wanted to hack for a while now.
The "brain" is a custom ATmega328P-PU with an arduino bootloader. I went this route since i have like 5 arduinos sitting around and use them for prototyping but i finally bit the bullet and put together a project where i built the board from scratch. It went so well that I bought a bunch more ATmegas. This first one is the prototype to test out the layout on the size of perfboard i'm using and since it was a perfect fit for this project i decided to use it.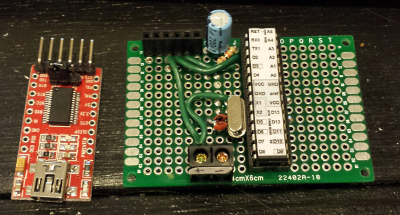
The robot will be driven by 2 continuous rotation servos like my previous robot "simple simon".
I am building in an ultrasonic distance sensor for obstacle avoidance.
I may put try to put a pan/tilt on it with a trigger to put some kind of nerf gun on it or something since i think it looks like it needs a weapon.
the body will also be painted white and i'll probably put some LED's or something on it to give it that "robot" kind of look.
I'm not sure how the back wheels will handle skid turning, but i guess i'll find out soon. I may have to replace them with casters.
Here's how it looked originally:

Obstacle avoidance