


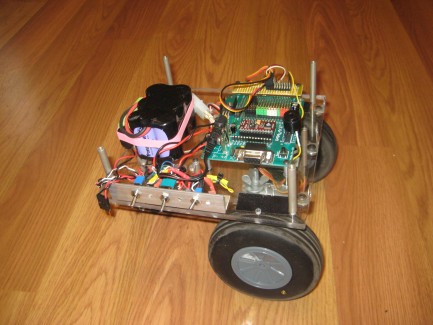
3 Servo Robotic Platform
I am back. My older work was posted under Prettybird, but that account stopped working. This one of my newer designs. It uses a back steering wheel instead of a coaster and can work well on smooth or rough surfaces. It is also designed to carry some weight. I have loaded it up to 1.5 kilos so far (about 3 lbs). So far I have used the Parallax Basic Stamp (BS2PE) and reciently added a Parallax Propeller board. I am finally in the process of learning the prop. I like the back wheel steering because it dosen't get stuck on sidewalk cracks and such. It uses 2 x 3" model airplane tube tires and has alot of traction and room for expansion.. Work still in progress.
Roam for now
- Actuators / output devices: 2 servos modified for continuous rotation, 1 servo for steering
- Control method: IR and X BEE in the future
- CPU: Propeller in the future, BS2PE stamp for now
- Operating system: windows XP
- Power source: 7.2V (motors) 9V (electronics)
- Programming language: pbasic, Propeller Spin
- Sensors / input devices: IR, Ping ultrasonic
- Target environment: Indoor and outdoor smooth or rough surfaces