


1st robot
This is my first robot. It can't do much now, but drive ahaead, since there are no sensors on it yet.
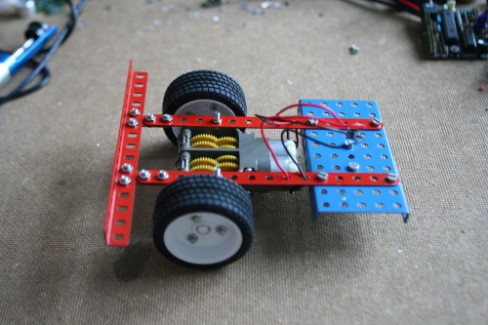
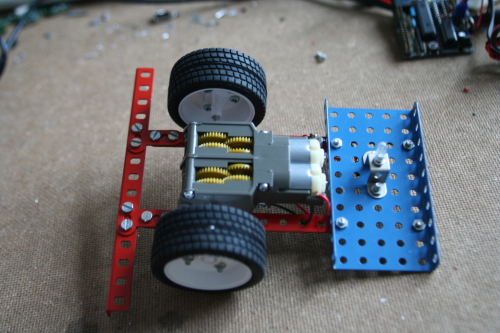
It's a simple robot made from a Tamiya Twin gearbox and some Tamiya wheels. The body is created from some old toys I had lying around. The rear end is supported by some plastic gizmo, that I found. What you probably can't see is, that the support is not perfectly centered, so in the first test, it dragged the robot to the left. I'll find a way to center the thing and maybe find something with less friction.
One other problem is that the gearbox is open. When it tried to drive over the carpet, the carpet got stuck in the sprockets and the vehicle stopped. I'll have to mount a cover under it to avoid this.
For sensors, I think I'll start out with a line follower. Then later, I'll go for a distance sensor.
UPDATE:
I just added a servo and a range sensor:
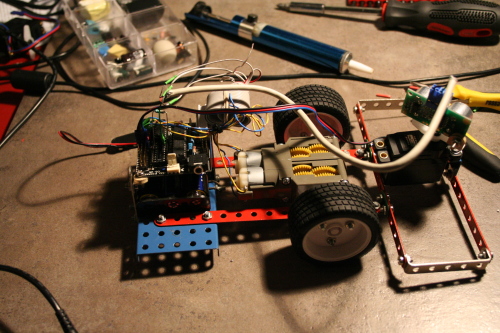
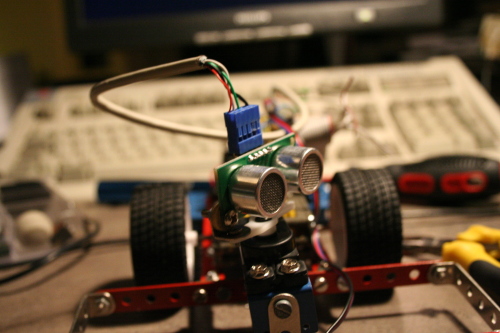
...making it a "real" robot. Next task is to program it to avoid crashing into stuff.
I see this robot as more of a "platform" than a real robot. The frame can be used to add all sorts of sensors and test them. The frame in the front could be used to mount a pcb with line sensors, for example.
Hope you like it
Right now, just drive ahead
- Actuators / output devices: Tamiya twin gearbox
- CPU: Picaxe 28x1
- Power source: 4, 5V
- Programming language: Picaxe basic