



12 DOF hexapod Scull
UPDATE - October 1, 2013
Hi all!
Mechanical changes: I changed design of a hip. Now the hip and the knee stay on one axis. And I also made leg and body alignment.
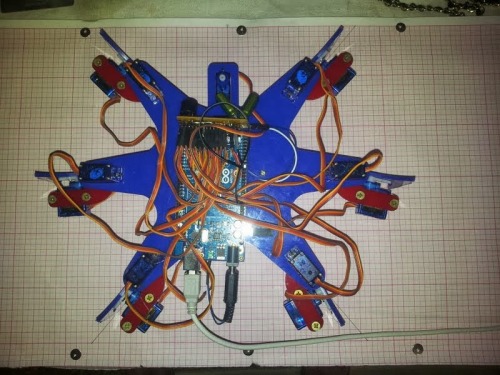
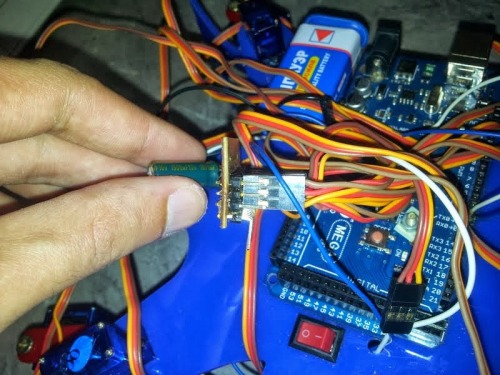
I added HC-SR04 and now my hexapod is in autonomous mode and scans the area and chooses the longest way. So when he finds the open door the hexapod will choose this direction.

I downloaded “Bluetooth RC” application from Google market and now I’m using this application to control my hexapod by Bluetooth.

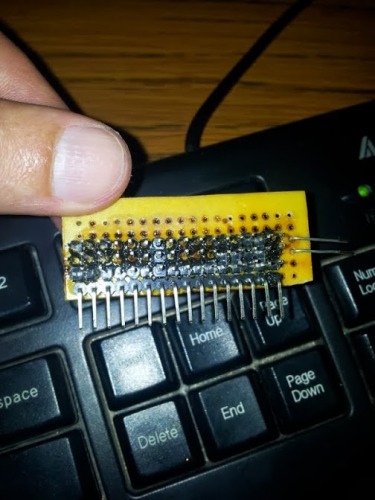
I also soldered own servo board

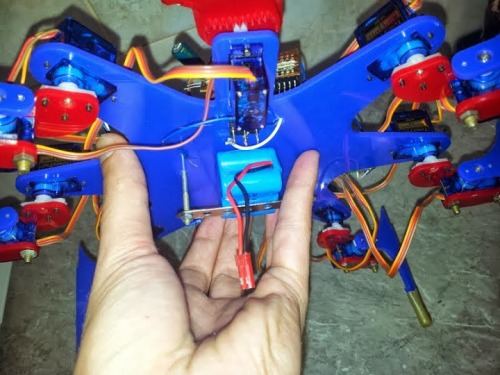
Bottom view
============================================================================
Hello' to everybody,
This is my second robot. And my first publication at this web site. I am a new member.
Now my robot controling only by bluetooth, but in future when servos come i will do it autonomos mode.
Later on I will upload more photos and video. I design this robot by my self and after this i send drawigns to the advertising agency and they made robot parts from 3mm acryl using laser cutting.
http://postimg.org/image/8vbve0w9f/
http://postimg.org/image/54c6hy193/
http://postimg.org/image/3qog1mngz/
PS Sory for my English.
Navigate around via ultrasound
- Actuators / output devices: 12 SG90 Tower pro servos
- Control method: autonomous, Bluetooth
- CPU: Arduino Mega 2560
- Operating system: Arduino IDE
- Power source: 7.2 V (waiting shipment)
- Programming language: Arduino Processing
- Sensors / input devices: HC-SR04 Ultra Sound
- Target environment: indoor