


1069-E1 - Hunting for Dust Bunnies
Start where?
Almost a full year on LMR and still no "start here" robot. That would be getting really silly. Especially with all this Mr Basic stuff going on.
This project has been limping along for more than a month now. If it were not for the challenge deadline, I would have limped for another month.
![]()
Actually, the bot did mighty fine, a few weeks ago. Too bad I did not deem it video-worthy yet. Because it has only deteriorated since 8-(. I burned a mini servo by inserting five freshly charged NiMh AA's for V2. I filled one slot with a 0 Volt battery and the (fresh) servo acts fine again. But now the robot is lacking power.
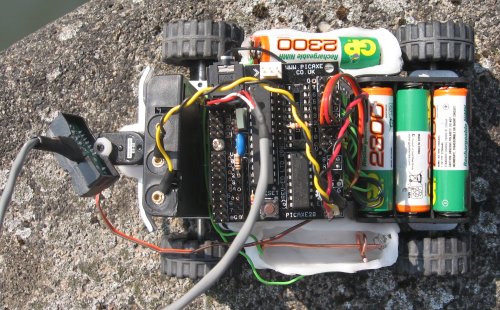
L293D
Yes it is possible to drive your Mr Basic motors with a L293D chip.
I know, the motors draw way too much current for the chip to handle, but I coded around that. The motors in this program do not fire for more than 230 ms at once. The swirl manoeuvre being the only exception at 460 ms. Yes that number was pulled from my hat. The chip stays relatively cool this way.
Obstacle avoidance
This explains the jerky motion of the vehicle. It moves, looks around, decides where (left or right) it saw the least obstacles/most clear space. And then it turns in that direction. Sweeps the area again. If anything is blocking its path straight ahead, it will again decide which way to go. This code often results in the bot oscillating left and right. Not getting anywhere.
Cliff detection
The Sharp sensor is angled down by a bit. That way a reading of 0 (zero) indicates that there is no floor to drive on. That is treated in the code as just another obstacle.

Again, the first version of my bot handled those cliffs beautifully. Now, not so much.
Chair legs jungle
At first, I had my code just look forward. Only when an obstacle was detected right in front, would it start to look around and consider alternatives. The bot would constantly get stuck with one of the front wheels against a chair leg. Those are tricky! The new code that always looks around does not suffer from this problem.
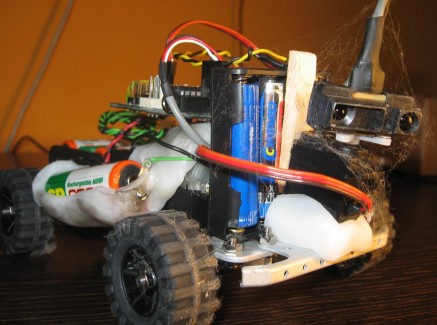
Dust bunnies
And that's how it became the Dust Bunny Hunter. It crawled under my table, couch, cupboard. As it turns out, almost all my furniture has a minimal 12 cm clearance for my robot. The main picture shows how it reappeared from the jungle that is my living room.
Parked for now
This project is parked for now.

Hunt Dust Bunnies
- Actuators / output devices: 2 dc motors
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 4x AA, 4x AAA
- Programming language: Picaxe basic
- Sensors / input devices: Sharp GP2D120 IR sensor
- Target environment: indoor