



1069-A1
Here is a brainless, nameless, clueless little vehicle that chases the light. It's a photovore. Well, it actually is just a photophile. It does not eat the light, it just likes it.
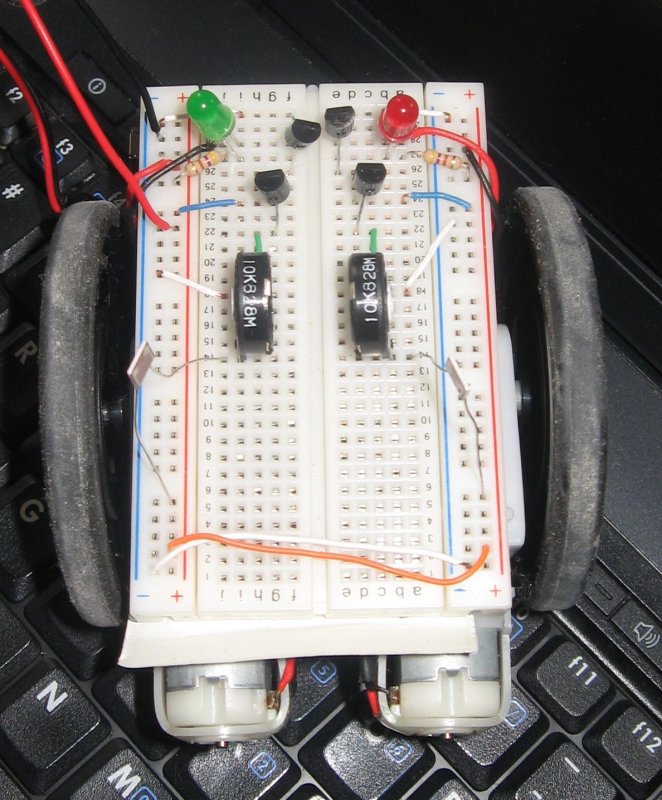
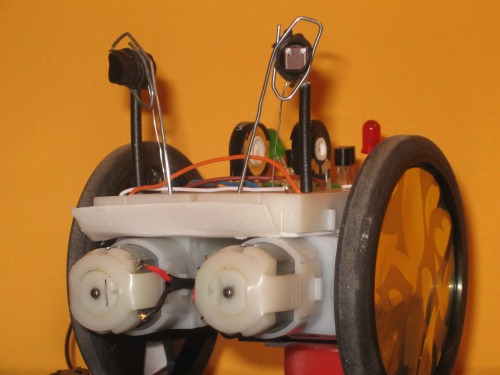
1069-A1 (by lack of a better name) is powered by 4 AA cells (NiMh rechargeable), not by a photo voltaic cell. Each motor has its own light sensing circuit.
The two LDR on stilts are directed in opposite directions. Each LDR is part of a voltage divider with a pot. The resulting voltage is sent into a darlington of two NPNs which in turn drives an LED and a 3-6 V gearmotor. The wheels are also Solarbotics, but in line with my "pimp your bot" lobby, I prettyfied them with a piece of gift wrap paper.

The photophile is easily turned into a photophobe by twisting the leads of the LDRs and turning the light sensitive faces outwards. The selectivity of this setup would probably improve dramatically when I encase the LDRs. As it is, 1069-A1 does not turn anywhere in daylight (hence no video yet). At night (yawn, make that late at night) with the artificial lights on, this creature will turn toward light sources.
Still is a brainless furniture humper bumper though.
The pots make it easy to adjust the sensitvity of the sensors. At night, I adjust them so that the wheels start turning at less light. At day, the LDRs are flooded with ambient light. The light seeking mode fails completely. A1 will just move straight forward until it bumps into anything.
The LDRs I used are quite sensitive. I covered them up with 2cm of black unshrunk shrinktube, but the tiny opening in the bottom would still let in enough light to trigger the LEDs.
8ik
Update 29 oct:
I did encase the LDRs and placed them on opposite corners of the board. Now it no longer drives out of the light beam. It's a proper bunny now: staring Chris' truck straight in the face!
Be a patient watcher and you can see A1 in action. Dancing in the shadows.
8ik
Update 1 nov:
Here's new pictures of the improved eyes. The placement on the breadboard is a big improvement as well.
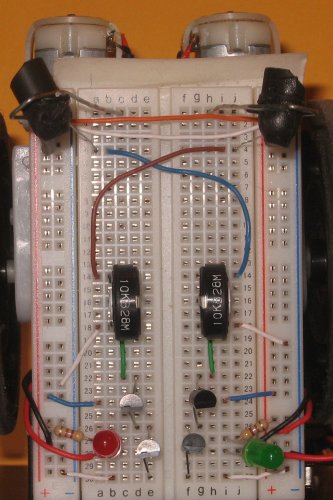
Notice the blue and brown wires. The starboard LDR (R11) is now on the port side of the bot. And vice versa. Both eyes are slightly turned outwards now. The little "riding hoods" around the eyes are cut off asymmetrically as well. Letting in more light from the outside. The effect is illustrated below.
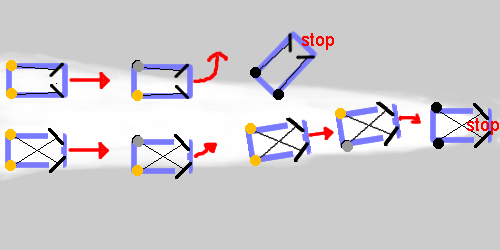
On the top of the image you see the old design. When one of the LDRs is outside of the light beam, the feedback mechanism makes it drive off into the dark. (Orange dot indicates motor turning full speed.)
The other bot has its eyes cross wired to the motors. When getting less light in one eye, the opposite motor will steer it back into the light. (Grey dot indicates motor turning less than full speed.)
At the far right, even the improved bot comes to a full stop because neither eye receives enough light anymore. (Black dots indicate motor full stop.)
Here's a closeup of the improved, encased eyes.
You can see the LDR sitting in the back of the port side eye, but not the one in the other eye. If you were a light (...) the green LED would light up and 1069-A1 would be steering towards you now!
8ik
update 30 dec:
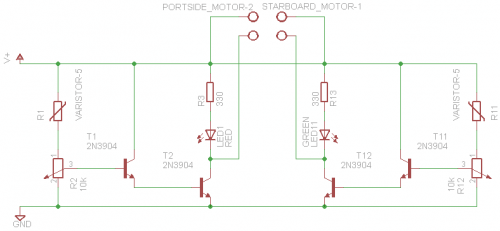
The LDRs are quite common M9960 (datasheet).
transistors: general purpose NPN 2n3904 or equivalent
(T1 and T11) could probably be omitted when using transistors with higher amplification factor (> 300?)
potentiometers: linear 10 kilo Ohm
LEDs: general led, forward voltage approx. 2V
power: AA NiMH rechargeable cells
motors: solarbotics gm9
8ik
Chase The Light, bumping into everything
- Actuators / output devices: 2x Solarbotics GM9
- Control method: none
- CPU: none
- Operating system: none
- Power source: 4 AA cells
- Programming language: none
- Sensors / input devices: LDR
- Target environment: indoor