

Homemade wheel encoder


Basically I just printed out one of these (laser printer recommended):
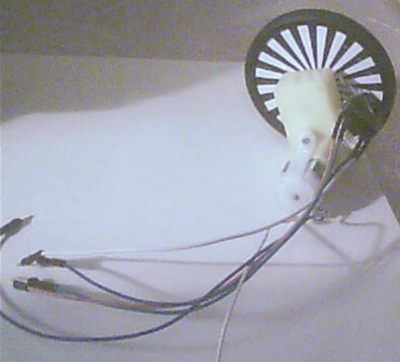
...And attached it to a wheel (double sided tape recommended).
Then I hooked up one of these (a 2$ IR sensor: QRB1134):

...And attached it to the motor pointing towards the wheel.
I've been testing it a bit with a few lines of Arduino code and damnit it works :D I'm now able to measure how much the wheel is rotating and therefore calculate how far a robot is moving. I just love it when these cheap lowtech solutions work.
Here are some photos (sorry about the bad quality):

UPDATE:
Here is the schematic I used to hook up the QRB1134 sensor:
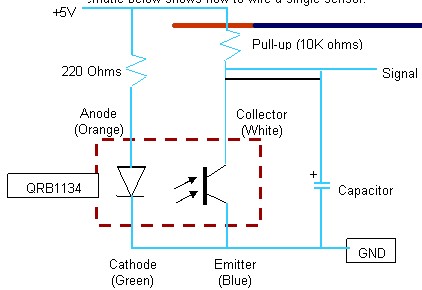
I used a 0.1uF ceramic cap. Don't know if that's what was intended? It does have a + indicating a polarized cap, but I dunno? Man I wish people would write the kind of cap you're supposed to use, but apparently that's obvious to everyone but me :/ If anyone has a suggestion of what to use I'm open?
Here is the Arduino code I used for testing:
#define IOP 14
#define PWM 3
int val_new;
int val_old;
int clicks = 0;
int turns = 0;
void setup() {
Serial.begin(115200);
pinMode(IOP, INPUT);
val_new = digitalRead(IOP);
val_old = val_new;
}
void loop() {
analogWrite(PWM, 80);
val_new = digitalRead(IOP);
if(val_new != val_old) {
if(clicks == 40) {
clicks = 1;
turns++;
Serial.print("TURNS: ");
Serial.println(turns);
}
else clicks++;
Serial.print("CLICKS: ");
Serial.println(clicks);
val_old = val_new;
}
}
Basically I just add 1 to the variable click every time the color in front of the sensor changes. When I reach 40 clicks I reset the variable click and add 1 to the variable turns. And off course I'm logging everthing through serial for testing. That's it :)
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!