

A journey through The Robotic Sailing World Championship 2019

On August 25 took place the twelfth edition of the WRSC (World Robotic Sailing Championship). For the first time, a Venezuelan team (made up of 3 members) managed to participate in the competition through the Diversity Scholarship Program that the organizing committee was granting.

A competition held in Ningbo, China. It had more than 17 teams in the present edition and had the participation of teams from multiple countries, especially from the host, China. The organizing committee invites teams from any organization, including individuals, schools, colleges, universities and companies, to participate in the contest. Each team competes with a boat.
The championship was organized into 4 challenges, each of which was provisionally assigned to a single day:
-
Fleet race: This challenge is based on the classic triangular sailing regatta course. Boats will start from the start line at 30-second intervals, cross the start line, reach three markers and start from the finish line.
-
Maintenance and station keeping: The station maintenance challenge is also called "virtual moorings", originating in real applications where your boat needs to moor or sail at a fixed location. This challenge, consisting of parts A and B, tests the ship's ability to accurately control on a small scale. You need to complete part A before going to the other area to complete part B.
-
Scanning Collaborative Areas: In recent years, there have been increasing attempts to use collaborative seagoing vessels. A typical collaborative task is to efficiently scan a large area. The collaborative area scanning challenge asks teams to consider the scanning skills and objectives of other teams to optimize their own points. The scanning task is performed in a large area that is subdivided into grids.
-
Hide and seek: This challenge involves interaction and networking. Detecting and pursuing a particular objective is a complex and high-level task for automotive vessels.

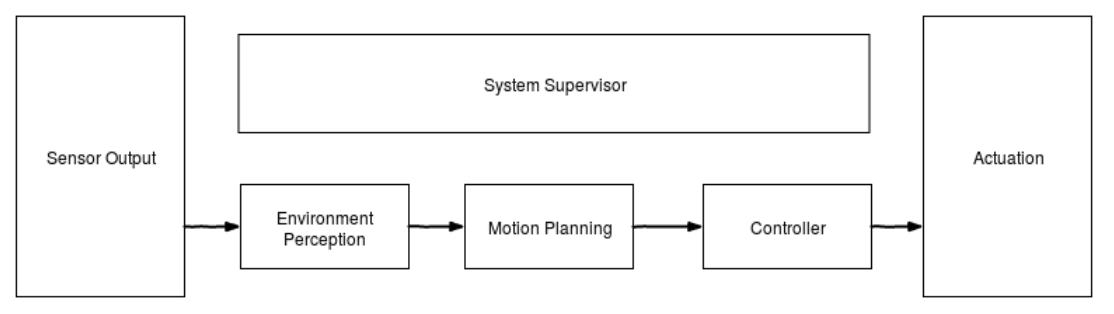
Main system overview
The system was grouped in three main subsystems that will be described in a more detailed fashion in the next sections: Perception, Motion planning and Control. For cognition tasks, two computers will be employed in the corresponding module. The perception and navigation module are the most demanding process of our system in terms of computational resources. A Raspberry Pi 3 B+ is considered for these data acquisition and data fusion tasks. The low-level control, used for the actuation mechanisms, will be based on a Arduino Uno board.
The main electrical and mechanical parts of the system are:
- The kit ready to sail that includes the boat and two servomotors, one to control the sail and another the rudder.
- A low-level controller represented by an arduino one.
- A central computer integrated with the robotic operating system (ROS), Raspberry Pi 3.
- IMU.
- GPS.
- A wind sensor.
- Camera
- Radio frequency command receiver.
For us to participate, it meant having in mind the following objectives:
- To represent for the first time Venezuela and Simón Bolívar University in the World Robotic Sailing Championship and International Robotic Sailing Conference (WRSC/IRSC).
- Initiate a new line of research of autonomous sailboats in the country, providing a test platform for future projects in the Mechatronics Research and Development Group.
- Develop and execute navigation and control algorithms for autonomous aquatic vehicles.
At the end of the competition, we are proud for:
- Sailboat instrumentation, including servomotors, inertial sensors, power supply and RF receivers.
- Implementing algorithms for sail and rudder control.
- Fundamentally, to have the opportunity to meet and share with the members of the main Universities dedicated to the research line of autonomous sailboats.
We are also grateful to the organizing committee for granting us the ready to sail kit, with which we were able to compete and now, we can continue working on new designs.
Robotics is now everywhere, more than ever before.
The oceans will soon be filled with driverless ships. Unmanned ship technology can drastically reduce the costs of ocean research, border security and surveillance in turbulent or remote waters.
Being able to research this type of platform not only helps with marine solutions, developing autonomous systems involves blocks of software and hardware that can be used in multiple types of vehicles: state estimation system, trajectory planner or even control algorithms.
Getting engaged in project development that involves seeing something move and "understand" its environment is the best way to learn and gain experience through our own experiences.
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!