

That seems to be great news! Really appreciate the thorough testing! We’ve been trying to replicate on our end and suspect that the older generation servos may be causing our issue.
I have the robot moving through direct manipulation of the limbs and base in RViz2, and I have it working with trajectories as well. So I am working in python now to compute walking algorithms and send them to the robot like Trajectory Builder does in this video.

4 Likes
@cmackenzie Excellent to see an update here! Guessing you’ve already informed @madmax ? If not…
Very nice model - looks like the real thing, and don’t see any / much lag between the virtual model and the real robot.
So as you said at the end of the video… on to the walking?
1 Like
Fantastic!! That is amazing… super cool ! I have the c code for walking @cmackenzie that I had used on mine. I am very much tempted to see if that can be ported. I will message you regarding this. I think we should have a catch up soon.
1 Like

@kurte - Ok i know what i did wrong that that time. Last Friday i had another modification to do and update on Arduino library manager. Seems like the last time i didn’t updated the tag inside the library so it was not picked up.
It is now, as well as my change.
Sure is quiet up here (  )
)
I hope everyone is doing well and that you all have a nice (safe) Holidays!
2 Likes
@kurte - It is certainly quite here.
Hope you are all safe and with that new Variant around… stay safe.
2 Likes
Ditto - happy holidays and stay safe 
3 Likes
Hello All,
Hope everyone is keeping safe. Wishing you all a very happy new year!!
3 Likes
Happy Holidays & New Year! @cmackenzie has been advancing with ROS 2 and has/will involve @madmax. The latest firmware update (under Experimental) seems to be working well. Hopefully video updates will be posted soon.
1 Like
A lot of code changes lately and the walking is looking much smoother! Yes, smooth but slow…I’ll turn the speed up soon enough.

3 Likes
Happy New Year all, hope you are all doing well and healthy.
Any updates on this?
Was a guru able to fix the packet reliability issue?
Nice work on the ROS2 stuff.
Are you using any of the timed moves and the like or are you sending out servo packets as fast as possible?
Again happy new year.
@cmackenzie is looking for opinions / ideas about control options using the Radiolink RC remote.

Brainstorming (so feel free to suggest alternatives and give ideas / insights etc.):
Nomenclature
- Throttle (THR): Left joystick up/down (analog) - spring recenter
- Rudder (RUD): Left joystick left/right (analog)
- Aileron (AIL): right joystick left/right (analog)
- Elevator (ELE): right joystick up/down (analog)
- Three way switch (3WL) (left)
- Three way switch (3WR) (right)
- Toggle switch (TSL) (left)
- Push Button (PBR) (right)
RC
- THR: Forward/Backward (ideally mixed with RUD and proportional)
- RUD: Rotate CW/CCW (ideally mixed with THR and proportional)
- AIL: Body roll
- ELE: Body pitch
- 3WL: Future use (ex. 3 positions for body height)
- 3WR: Future use (ex change walking gait tripod / adaptive / ripple)
- TSL: Future use (ex. Reset position / home)
- PBR: Future use (ex. enable terrain adaptation)
Computer
- THR: Keypad W, S or Numeric keypad 8, 2 (not proportional)
- RUD: Keypad A, D or Numeric keypad 4, 6 (not proportional)
- AIL: Keypad arrows up/down or Numeric keypad 7, 9 (not proportional)
- ELE: Keypad arrows left/right or Numeric keypad 1, 3 (not proportional)
- 3WL: Future use (walking gait tripod / adaptive / ripple)
- 3WR: Future use
- TSL: Number 5
- PBR: Future use (ex. enable terrain adaptation)
We don’t need to use all joysticks / switches.
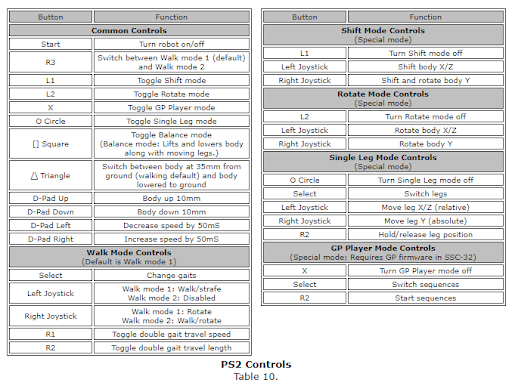
PS2 Reference with Phoenix code (if it helps):

There was a previous idea about using a PS4, which offers additional input (four left and four right buttons), and instead of a three position switch on each side, there are two way switches. A PS5 controller seems very similar to a PS4.
Colin did additional testing with the latest experimental firmware and found no errors. It may be best to proceed using EM0 for the moment while our developers explore improving EM1. Colin can explain what he’s doing more.
1 Like
Are you using any of the timed moves and the like or are you sending out servo packets as fast as possible?
I am not using EM1 at all. I really like how EM0 mode works and I can get the higher level controllers in ros2_controls to plan motion more wholly and since my end goal is robot compliance I need the EM1 motion control disabled. My current control loop is 18 servos at 50Hz and 1Mbps serial and setting position and effort, and reading position, velocity and current (effort). I’ve run it for weeks 24/7 and I don’t see any errors. I’ve run the loop up to 100Hz and verified in the Saleae that it’s good. I moved back to 50Hz because I had other bottlenecks in my ros2 code making 100Hz useless…but even those are gone now so buckle up Ms. Daisy! This is a far cry from the previous per-servo request/response but it does mean constraints on how the multi-servo requests are sent.
Maybe give EM0 a try. You might even be able to get extra smoothness by doing your own motion. My motion is smooth atm. Orocos KDL (C++ lib) does all the IK, and most of the motion planning for me.
3 Likes
We’re starting to brainstorm a new electronics board intended to be a HAT for the Raspberry Pi and would like your input / feedback.
Primary functionality
- Allows for a single power source to be used for a robot (powering servos, RPi etc.)
- Allows the Pi to control LSS servos
- Ideally also compatible with NVidia Jetson Nano (mechanically and electrically)
- Not intended to be “stand alone”, nor replace a Teensy breakout to LSS, nor replace the LSS Adapter.
- Can be used on Lynxmotion SES V2 robots like the hexapod, quadruped, humanoid
Components (minimally)
- Battery input (The LSS Adapter uses an XT60 because it’s a popular LiPo connector)
- LSS Connectors (each connector can theoretically handle 2A, and one HT1 can consume ~1A at 25% load)
- Logic level conversion (RPi operates at 3.3V, LSS bus is 5V)
- 2x20 pin header (RPi standard)
- RC PPM input (to be able to connect an optional standard RC PPM receiver: PPM / 5V / GND) Example
- LEDs: serial Tx, Rx, PWR
- Step-down voltage regulator (assuming 3S LiPo or 12V NiMh / Lead acid): ideally slightly above 5V and ideally >3A (4A+)
Questions
- Add an onboard IMU? Pinout for a separate I2C IMU? 6-axis or 9-axis (i.e. includes compass)? 3.3V or 5V operation?
- Add a (single) resettable fuse after the main battery?
- Use several serial busses from the RPi or just one?
- Pins to power external devices (3.3V, 5V, VIN) and GND?
- Voltage monitoring (Vin)?
Other ideas? Considerations? (Examples below)
- LED, RGB LED or neopixel connected to RPi pins for effect / status / user selected?
- 3.3v or 5V 3-pin headers (S/V/G) to add sensors
- etc.
@cmackenzie @kurte @geraldinebc15 @xan @zenta @scharette @cyberpalin @madmax @dickel
1 Like
Great to hear @cbenson! I was thinking I’d need to make one myself. Here is what I already had compiled for my wish list.
- Based on Compute Module 4 (to keep the it small and light but I also think it depends on availability of Computer Modules now)
- powerful enough switching regulator to power the Rpi from a 12v battery
- Lipo Battery charging circuit
- Teensy-like ARM32 (probably just a header mount)
- Fan PWM for RPi chipset
- RPi power button (momentary)
- RPi doesnt have a clean way to shut down…so if a hard-break power switch or pulling the battery will only lead to corruption of SD card fast
- Small 0.96" OLED or so (bootup status, robot state, etc)
…and last but not least…a low-cost CPLD based device for signal routing! This would be used to provide logic-level switching between 3v and 5v but primarily be to interface peripherals between the RPI (or teensy), especially the LSS ports. So like the LSS Adapter board it would have about 6 LSS ports but they are not connected together. Instead each of the LSS ports goes to the CPLD. The 4 serial ports of the RPi4 would also go to the CPLD, as would the Teensy. Now the RPi can set a register on the CPLD to determine where each LSS port is connected, you can connect all LSS ports into a single serial port, or connect some LSS ports to dedicated serial ports on the RPI or the Teensy instead. It could also route a dedicated RPi serial to a single LSS port for non-LSS stuff like a serial GPS.
The XC9572 CPLD is one I’ve used a number of times, it’s cheap at about $1.70 in quantity and easy to program. I feel like there is probably cheaper and more recent CPLDs out there though. FPGA could work too, but I feel this feature is more suited to simpler CPLDs than a FPGA. I can help here to create the Verilog code to program the device and write the linux driver to configure the routing.
1 Like
Sorry I thought I responded earlier to this, but probably started message and forgot to send
Again hope everyone is doing well and having some fun (and staying safe)
For now I sort of lost steam and put all of this stuff on hold.
Was curious about the follow on to LSS and your new smart servos. The EM=1 stuff looked interesting as it feels very much like a follow on to the old LSS stuff and the SSC-32.
As mentioned could probably get things to work with EM=1 and have host do the interpolation.
Glad you are coming up with a ROS2 solution. Will continue to follow on to see your progress.
Some reason I have difficulties with the idea that there are no messages which become corrupted when using EM=0 when run at 50hz for days, but I was seeing a significant number of them with EM=1 at low number of messages per seconds (like only a few). But weirder things have happened.
Again it is all going well, and I have continued to monitor this thread.