

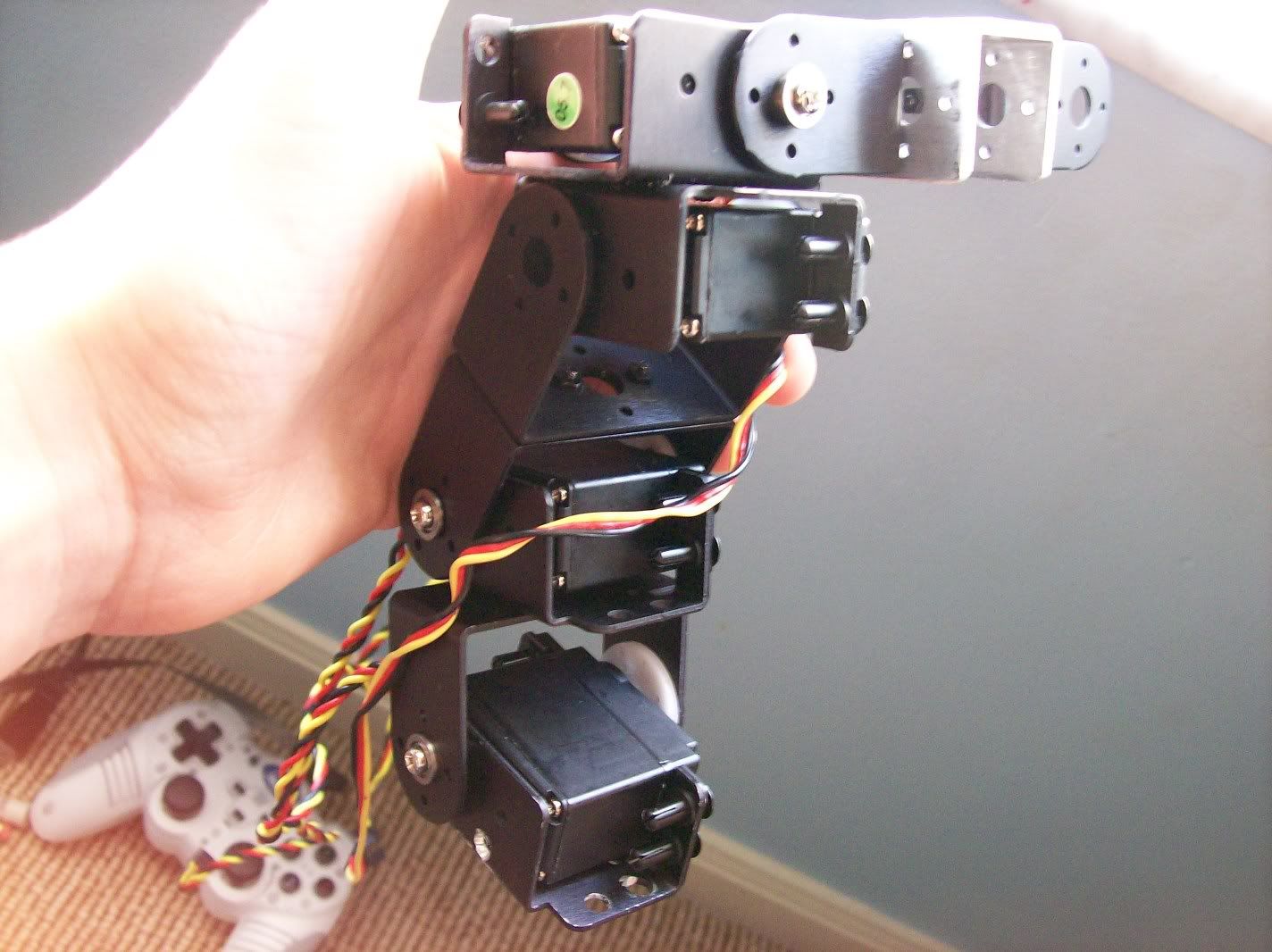
Ok, Heres the pics :
Just wanted to try out some Photo Editing skills. 8)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Iso.
{kind=link}
{kind=link}
What do you think?
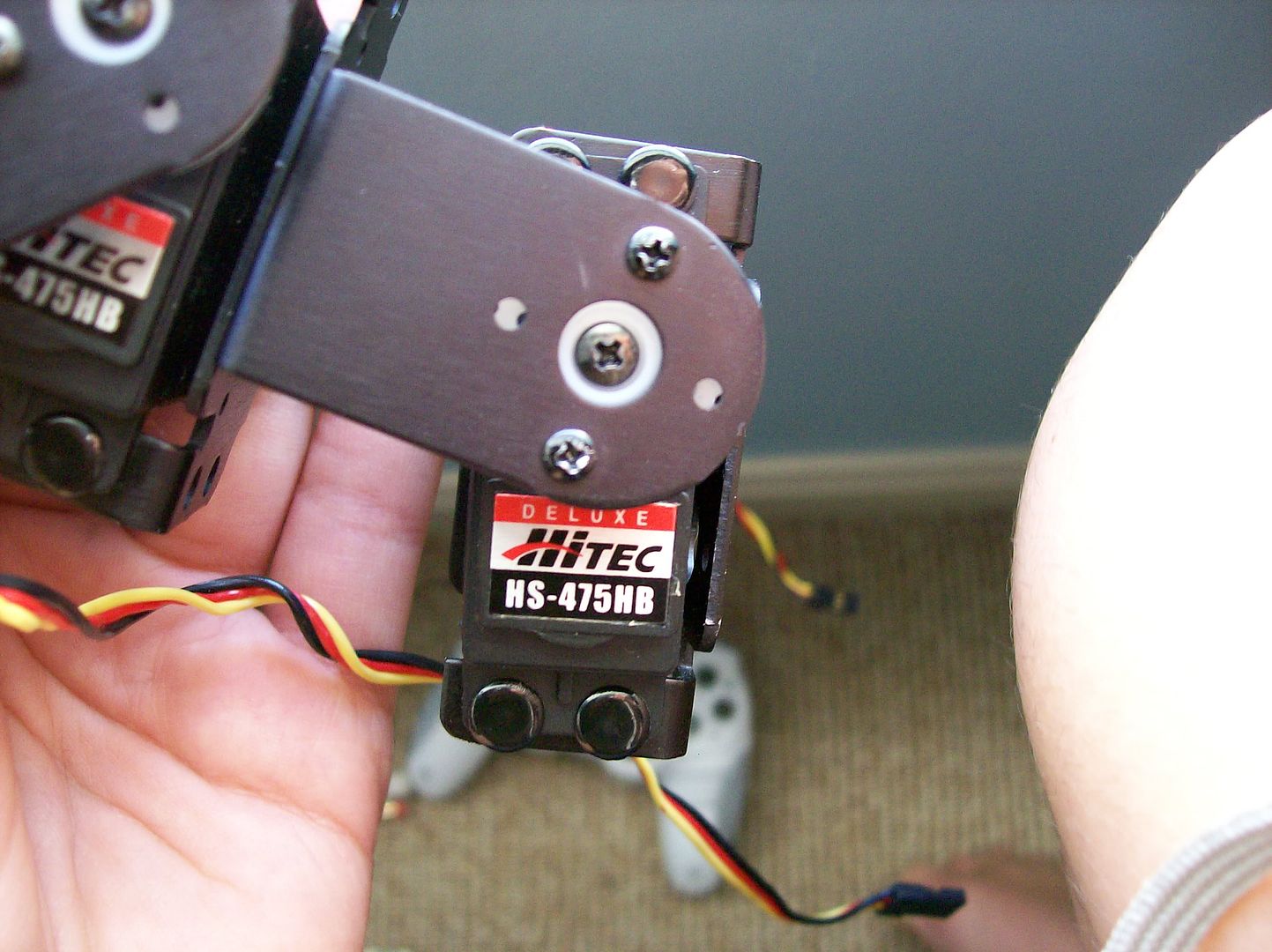
These two photos… Are they shown in what you expect to be the standing position? If so, you may experience problems with a lack of range of motion in the reverse knee joint when it comes to stepping high enough to clear the ground by any meaningful amount, since it appears that the knee joint is already fully contracted in the photos. Adjusting the position of the knee servo so that the short side of the servo’s case points toward the front (instead of the long side, as pictured) may result in a wider range of motion, since you won’t be pinching the case between the two brackets.
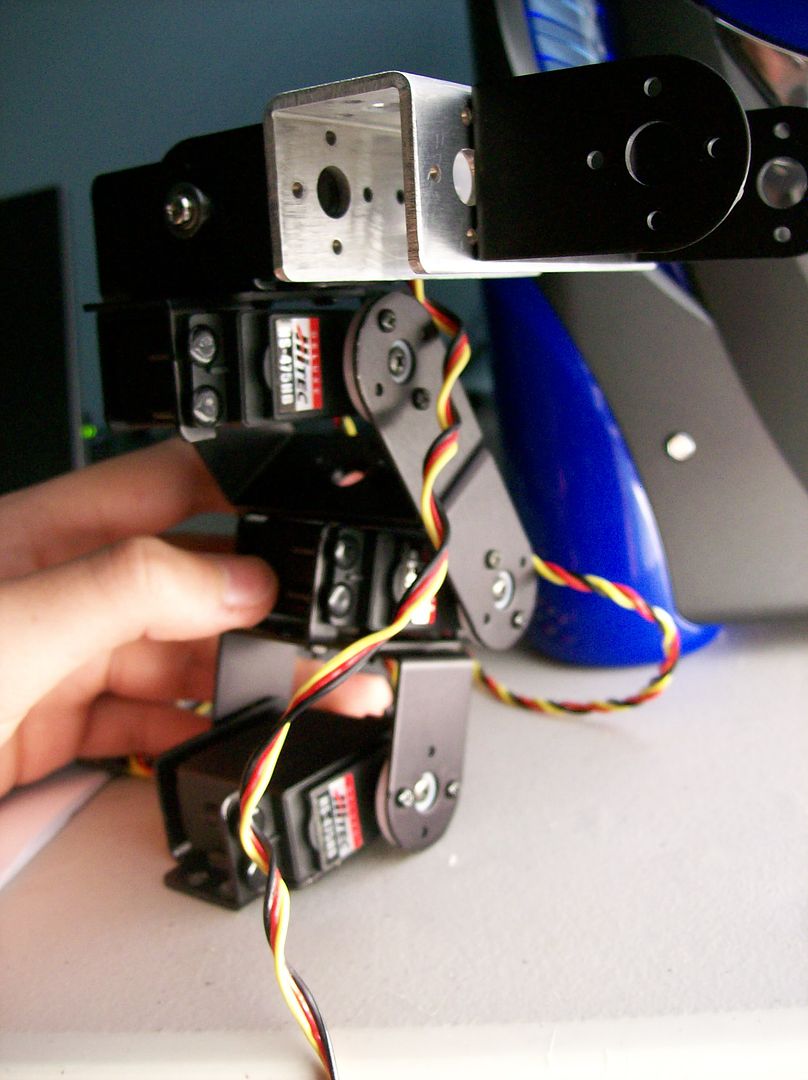
I guess I am wondering… how does it turn? walking forward and all should be fine, but how does it go left?
Turning might have to be done brat style where the legs are moved in opposite directions simultaneously, but it depends on the foot design he uses really. If the foot is not smooth on the bottom like the brat, then the sliding action may not work very well.
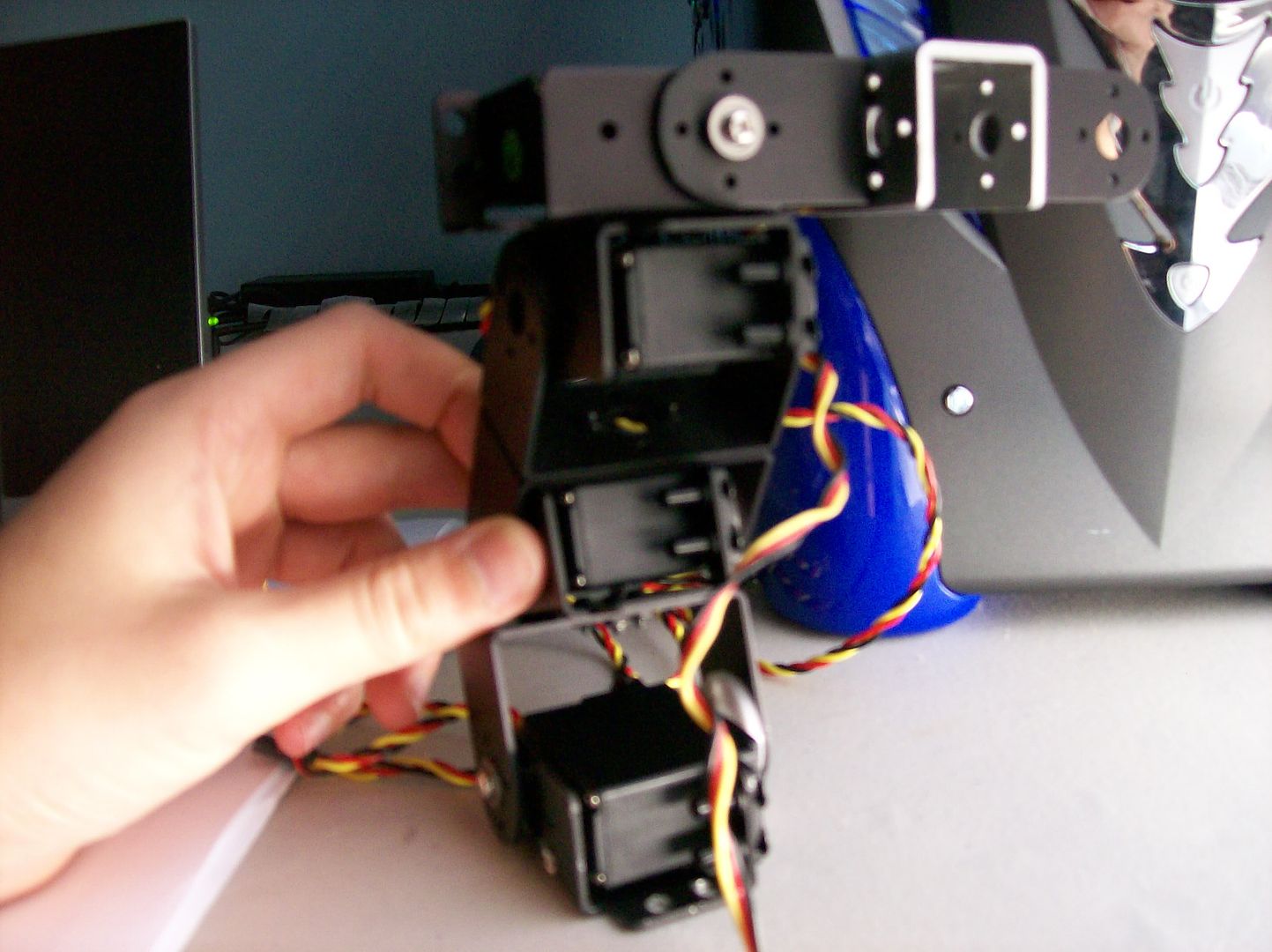
Looks that way from the photos. No hip yaw axis is shown, so I assume that foot-slide turning in in the plans. This is the primary reason why I haven’t done much with my BRAT-configured biped recently - it’s waiting for a hip upgrade, but it’s been losing the battle for attention and parts, so it’s still waiting on some more servos and brackets.
@ Seamus : I said I’m short on Brackets, But I didn’t say that I was also replacing them with Long “C” Brackets.
@ Everyone else :
I haven’t done the Upper body yet, Because of lack of parts.
Yes, The bot will turn like the brat.
Just so I don’t confuse everyone, as I said in my other post, i haven’t finished the other leg yet, But once I order my parts from Lynxmotion, I’ll be able to finish the other leg.
The feet are going to be custom made, and they are going to have special touch sensors on them, and I’ll make them have little shocks near the toes, to keep it balenced.
hmmm, this is really interesting… last summer I wanted to get into vacu-molding… I guess I’ll do it this summer… The idea of custom foot (you can make it real cool) plus sensors on the bottom is cool!
Wow sam, I haven’t seen you in…FER-EVER. 
Anyways, Thanks. 
Yeah, but I come once in a while to read the threads and keep myself updated.
I found this one interesting, so why not post  I’ll probably be hanging out here in the christmas vacation, for the moment I’m to stressed out by all my exams.
I’ll probably be hanging out here in the christmas vacation, for the moment I’m to stressed out by all my exams.
See ya later
Exams? The’re in late Jan here in toronto…
Same. Hamilton Kicks Arss!  The Bulldogs hockey team rocks (won the calder cup last year), But our football team sucks
The Bulldogs hockey team rocks (won the calder cup last year), But our football team sucks 
Umm…can we stay on topic here?
Anyways, i finally got a chance last night to replace all those nasty little Nylon Snap Rivets with screws. I don’t think i need any pics though, since its just a small update. so far I’ve got $268.63, which, hopefully, is enough for all the parts that I need.
Down to the cent, nice.
You can probably make you’re own vacu-molding for not a lot if you go to a local hardware store you can find evrythig you need.
Then You have to do youre prints, wich is going to be nasty I believe, lots of trying to get the right thing.
Keep us uptaded and give us piks of waht it looks like!
Yeah, I have a few hobby stores around here. I also have a few Lowes/Home Depot stores around here.
So, did you start building the vacu-molder? It should be very interesting!
Sorry it took me so long, I’ve been busy.
Nah, I havn’t got any updates yet. I’ll try to get something done soon though…
Will the new Gyro Sensor that Lynxmotion has in stock work with the Basic Atom?
Got any pictures yet?
I don’t think he’s started yet
Sorry, I was on vacation. I haven’t had time yet to do anything else besides replace the Nylon Snap Rivets with Screws.