

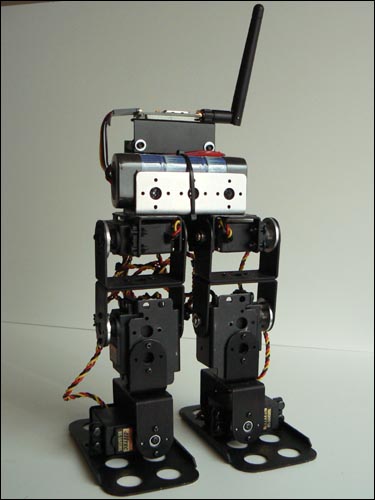
I have allready assembled it and it seems very heavy and big,it barely fits in bracket at all,i had to remove some o the screws to get it to fit in there.
You need the 6.0V 1600 mAH pack for the BRAT. That one should fit the U channel holder just fine.
8-Dale
Damn,I got the Wrong one then 
I’m running a 1400 mAh 7.2-volt NiMH pack in my BRAT biped. It’s a commercial pack built from 2/3-AA cells that I had sitting around, having purchased it for another project. It fits inside the C-channel with a little bit of gap, but a zip-tie and a strip of non-slip padding keeps it in place quite well (as well as providing a layer between the screw heads inside the channel and the pack’s shrink-wrap coating). The pack provides plenty of run-time, even when holding awkward positions for long periods while I get the servo positions hammered out.
Yeah,but yours is probably a lot lighter than mine.
Yours is a 5-cell Sub-C pack, mine is a 6-cell 2/3-AA pack. I don’t expect that there would be all that much difference between the weights, but depending on what servos you are using, and how they perform at 6.0 volts nominal as opposed to 7.2 volts, you may or may not run into issues. I suppose you could always try it, and if it works, then great - you’re in business. If not, then you can pick up a different pack that will fit better, and you have a nice 5-cell pack for use on other projects.
I am also using 475HB servo’s,and they can barely hold it up.
I kind of halfway remembered having one of those 5-cell packs around here, and sure enough, I did.
Tossing them on the scale, it says that…]The 5-cell sub-C pack weighs in at 9.4 ounces (267 grams)/:m]
]The 6-cell 2/3-AA pack weighs in at 5.0 ounces (143 grams)/:m]That’s a difference of just 4.4 ounces (124 grams) - or 22 US quarters - not a tremendous difference, but it might be enough to cause problems if your bot really is on the borderline of functionality.
[EDIT: depending on the servos you are using, the increased voltage of one additional cell may improve the available torque enough to make a noticeable difference, too.]
My 6-cell pack is just a cheapie that I picked up at a local hobby shop. I think it’s a standard size used in the mini trucks and such, since there was a fairly good selection of packs in this form-factor. I didn’t go for fancy or expensive - I just wanted cheap volts, and it’s worked great for me ever since.
Here is some quick photo’s i took of the battery pack,Notice how it is sandwiched in between the Bracket :
http://i122.photobucket.com/albums/o255/wowy5/IMG_5109.jpg
http://i122.photobucket.com/albums/o255/wowy5/IMG_5108.jpg
http://i122.photobucket.com/albums/o255/wowy5/IMG_5106.jpg
http://i122.photobucket.com/albums/o255/wowy5/IMG_5105.jpg
http://i122.photobucket.com/albums/o255/wowy5/IMG_5104.jpg
The 475’s work well at 6.0vdc. I never run them at 7.2vdc because they become a bit hyper and jittery. The BRAT should work ok with that pack, but if you plan to add additional electronics, cameras, sensors, etc. Then I would recomend switching to a 5 cell AA pack. Looks nice though…
Ok,as long as it works.
Oh another question,Is there any BRAT sequences for the SEQ avalible?
because I’m not good at using the Sequencer yet,so i need something to test the BRAT with to see if it can Walk.
On the Information page, under the heading of bipeds], there is a BRAT assembly guide. Directly under that, there is a link to a tutorial for using SEQ with the SSC-32 to control a BRAT. The sixth line of text in the tutorial is a link to a ZIP file with a number of pre-built functions. (under the lines that read: “Software:” and “BRAT projects”, with an arrow pointing at the link.)
I looked at these, and they gave me an idea of some of the motions I would be going through to perform the various functions, but I found it more educational to just build my own sequences using the pre-built ones as guides, rather than modifying them.
Thank’s fot he Help Seamus,But i tried the sequence where the BRAT is supposed to kick,and it kicked backwards,I have a Video Here :
i122.photobucket.com/albums/o255/wowy5/th_100_0163.jpg
Yeah, my servo offsets were far enough off that I didn’t have much luck with using the “canned” sequences as-is. That’s what I meant by it being more educational to use those as a basis for building my own sequences - by looking at the steps that were being performed, and in what order, I got a feel for how to go about achieving the desired result, and then built my own sequences with the correct offsets, directions, etc. for my bot.
I much prefer to learn how it works and then apply that knowledge than to just use a series of pre-canned moves, anyway. If that was all I wanted to do, I may as well have just bought a toy off the shelf.
Well the point is that i wanted to test it because i am still learning how to use the sequencer,not to spend two months learning how to use it.
For testing purposes, it looks like you’ve got the axes working properly, as they all appear to be responding to the movement commands.
For learning the program, nothing beats sitting down with the documentation and tutorials. That’s what they are there for - to document and tutor. Read them, work with the program, and you’ll soon figure out what does what, and how the controls translate to your bot’s motions. It won’t take weeks; if you read the supplied materials, you could be easily be creating your own sequences within an hour or two - quite possibly a lot less than that.
Ok,Thank’s,It looks like I’m going to be making my own Sequences 
Ok,I’ve made my own Sequence,its not the Great but it gets the job done :
i122.photobucket.com/albums/o255/wowy5/th_100_0164.jpg