Well…my first step is to learn about the basics of building and programing a robotic arm on a roving platform. As far as the underwater ROV stuff, I do have some interesting observations from aboard ship of Jason2 and ABE.
First, Jason2 is ROV (remotely operated vehicle) that is tethered to the ship. One thing I noticed is that the electronics compartments are one of two kinds…titanium pressure vessels for the sensitive electronics or special oil filled boxes for the pressure tolerant electronics and wire junctions. (not sure what kind of oil). Also, Jason 2 must be tethered since it is unmanned being a mile and a half below the surface of the water and radio waves do not propagate well through water. On board ship is the Control Van which houses all the sophisticated electronics, controls, and scientists and engineers that operate Jason. For more info on this, check out this links. whoi.edu/page.do?pid=8423 which has the specifications for Jason2.
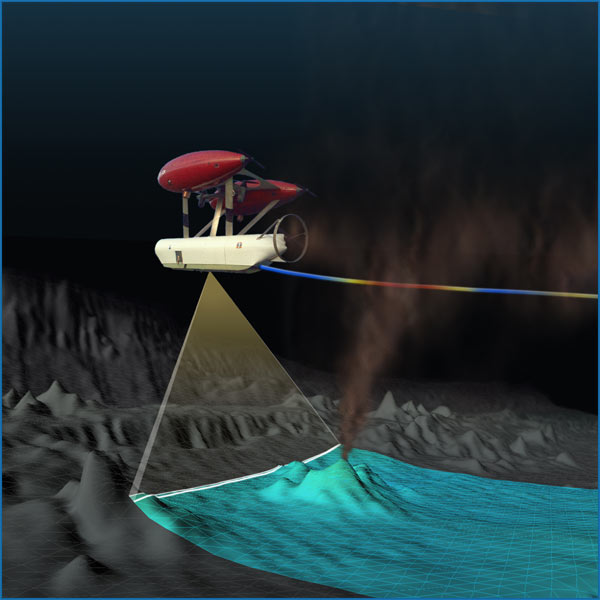
Now, a different sort of platform is ABE which stands for Autonomous Benthic Explorer, and is an AUV (autonomous underwater vehicle). This is more of your independent robot that you send out and forget about until it is done with the mission. For example, ABE maps out the ocean floor. A ship drops it off at whatever location it wants mapped out, say a site of hydrothermal activity, and ABE descends to the sea floor and maps out the whole area with SONAR. The ship is free to go off to another location while ABE works. (visions05.washington.edu/documents/VISION/abetopo.jpg). ABE also can sense a plume from an underwater volcano or a change in water chemistry (the picture link above shows ABE sensing a change in water chemistry as it passes over a plume) and then goes back and surveys that area with better resolution for further exploration. One the mission is complete, ABE surfaces and sends out a signal to the ship which tells it where it is and then the ship comes and picks it up and downloads the information stored during its mission. More on ABE is here whoi.edu/page.do?pid=8458
Additionally, there are newer AUVs like the sea glider and the deep glider from the University of Washington that are so energy efficient, they can stay underwater for up to 1 year gathering information and when they surface, they just transmit their data via satellite or receive new instructions that way so they don’t really even need a ship except to launch or change the batteries. In this way, they are almost fully autonomous. Plus, they can go to depths of 9000 feet (deepglider) which is a 266.5 atmospheres so they can take a lot of pressure.
thedaily.washington.edu/article/2007/3/30/divingDeepBelowTheSurface
Anyways, some asked for links to these competitions. Here they are.
The first is sponsored primarily by the US Navy. This competition has both ROVs and AUVs as entries.
AUVSI & ONR’s International AUV Competition
auvsi.org/competitions/water.cfm
and a pdf describing the competition is here…
auvsi.org/competitions/NEST.pdf
Also, from this site, I would encourage looking at the competitors list for more information on their robot builds because each team is required to submit a journal paper (which are provided at this link auvsi.org/competitions/2007/07Competitors.cfm) that describes the designs in great detail for each of the ROVs or AUVs…so you can see what universities like Duke or Cornell or the US Naval Academy used in building their ROV or AUV.
The second group of competitions is mainly for ROVs (not AUVs) marinetech.org/rov_competition/ and is sponsored by several scientific ocean research groups from NOAA to the Marine Institute. Here, you get to use your ROV to collect samples and to deploy equipment like sonar or seismometers. That link contains all the necessary info from how to apply to design specifications to tasks one must complete that simulate real world scientific research with ROVs. Also, there are several competitions across the country listed on this page that one can participate in before going to the National and then International competitions also linked from this page.
So with that, thanks again for all the insight. I hope you enjoy the links and maybe are inspired to build that AUV or ROV.








{kind=link}