cool, well that very kind to offer your help. i think i stick to the telemetry for this project, but i would be very interested in getting the “platform” work with IK for future projects.
would be a very interesting piece of code to look at.
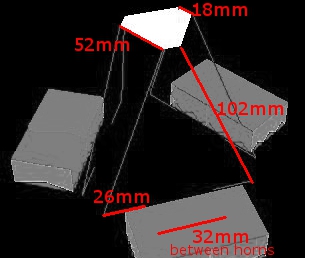
not really. precision is not key. you will notice that the two top platforms are different sizes. to get them working a little better i could make them the same, but its not important.
i could also get the servos in the slave to have more movement in it than in putted from the master. like 2:1. small movement on the master will result in larger movements in the slave. ??
Thats awesome!
You always come up with some cool stuff!
I wonder if FK is hard to do for a Stewart platform?
Is it hard to operate the 6DOF joystick? I mean, it looks like the joystick should be fixed to the table. Does shorting the motors give to much friction, maybe a resistor to lower the friction?
apparently the FK is quite a challenge. IK can be solved quite quickly by this is all iv been told.
There you go… there’s a challenge for ya.
There is not too much friction and its quite easy to use. i haven’t soldered the motor wires together otherwise i think there would be too much friction.
your right i do need to attach it to a more stable surface.
On a regular Stewart Platform, IK is straightforward (it’s a matter of vector arithmetics) and you can do each leg independently, while FK requires to solve a set of 6 (linear) equations with 6 parameters all at once. My vote would be on the “IK is easier” side.
On this setup, the actuators rotates instead of translating and there is an additional link in each leg. It unleashes a flurry of trigonometric functions, both for IK and FK… Solving a set of 6 non-linear equations to compute FK seems harder to me than computing IK, where you “just” need Al-Kashi and quadratic equation resolution.
Due to being made redundant last week i cannot continue with making the “puppet hexapod”, as it cost quite a bit for me to make the moulds etc…
But dont worry i started another project with what i have at hand. more on this later.