



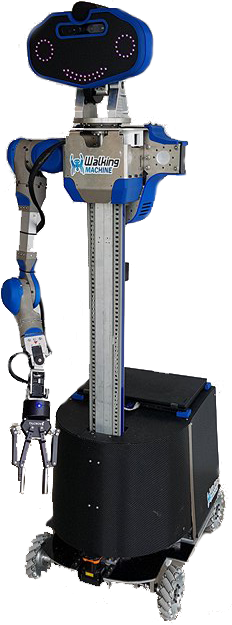
Developing an autonomous assistant robot for the Robocup@Home challenge
All our software we've developed is open source and can be found at : https://github.com/WalkingMachine.
Our robot is currently using ROS kinetic on Ubuntu 16.04 LTS.
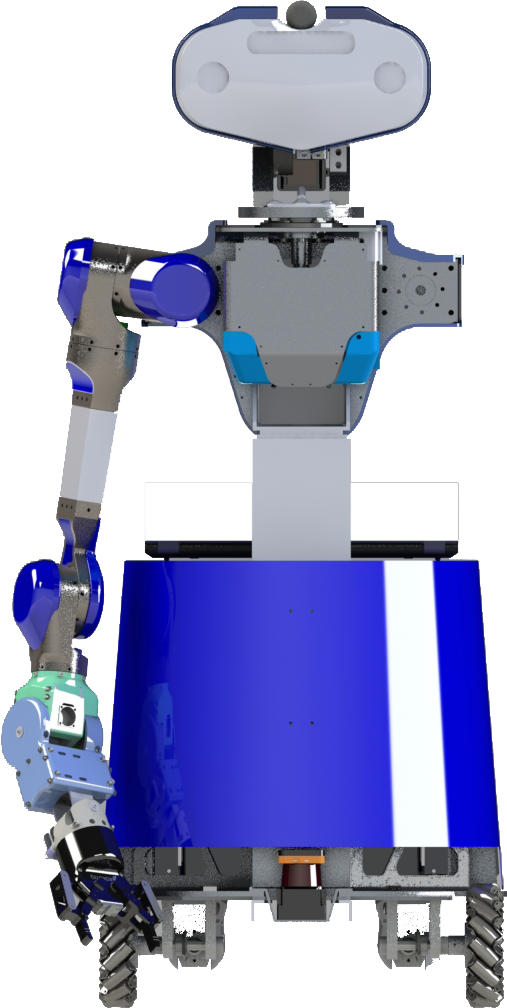
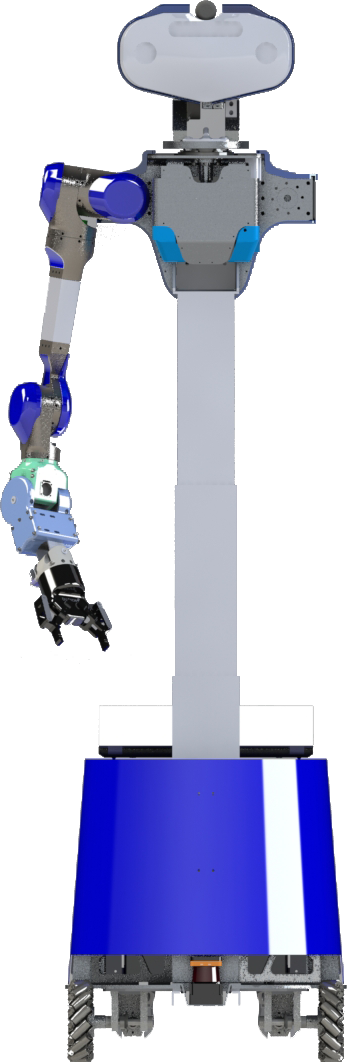
Hardware Description
| Base | Custom base with fully holonomic platform |
|---|---|
| Vertical column | TiMOTION TL5 |
| Right arm | 7 DoF custom made arm made of 5x Kinova motors and 2x Dynamixels (MX-64R) |
| Neck | Tilt and pan unit using 2x Dynamixels MX-64R servo actuator |
| Gripper | Robotiq 2 finger 140mm. |
| Dimensions | Base : 0,61m X 0,77m Height : 1,22m (min.) 1.78m. (max.) |
| Weight | ~70kg |
| Additional sensors | Hokuyo UTM-30LX |
| Microphone | Rode microphone VideoMic |
| Batteries | 2x 20V Dewalt drill battery 5aH |
| Computers | 1x Lenovo P50 32GB of RAM, Nvidia Quadro M2000 4GB 1x Nvidia Jetson TX2 2x Raspberry Pi 3 (Touch interface and sound localization) |
Software description
| Operating system | Ubuntu 16.04 with ROS kinetic |
|---|---|
| Navigation, localization and mapping | Gmapping, AMCL |
| Face recognition | ros_face_recognition |
| Speech recognition | Google speech API |
| Speech comprehension | wm_nlu |
| Sound localization | wm_odas_ros_wrapper |
| Speech synthesis | Svoxpico and Google text-to-speech |
| Object recognition | YOLO V2 |
| Arm motion planning | MoveIt |
| Task executor | FlexBe |
| World representation | wonderland |
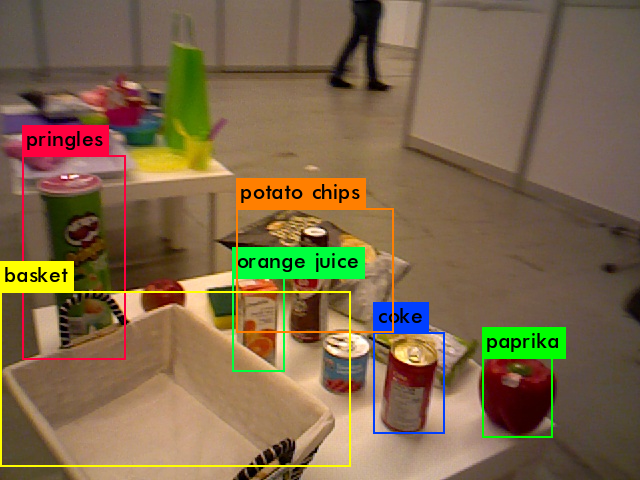
Objects recognition using YOLO V2

Vertical motion to reach objects on the floor and on the higher shelves of a cupboard.
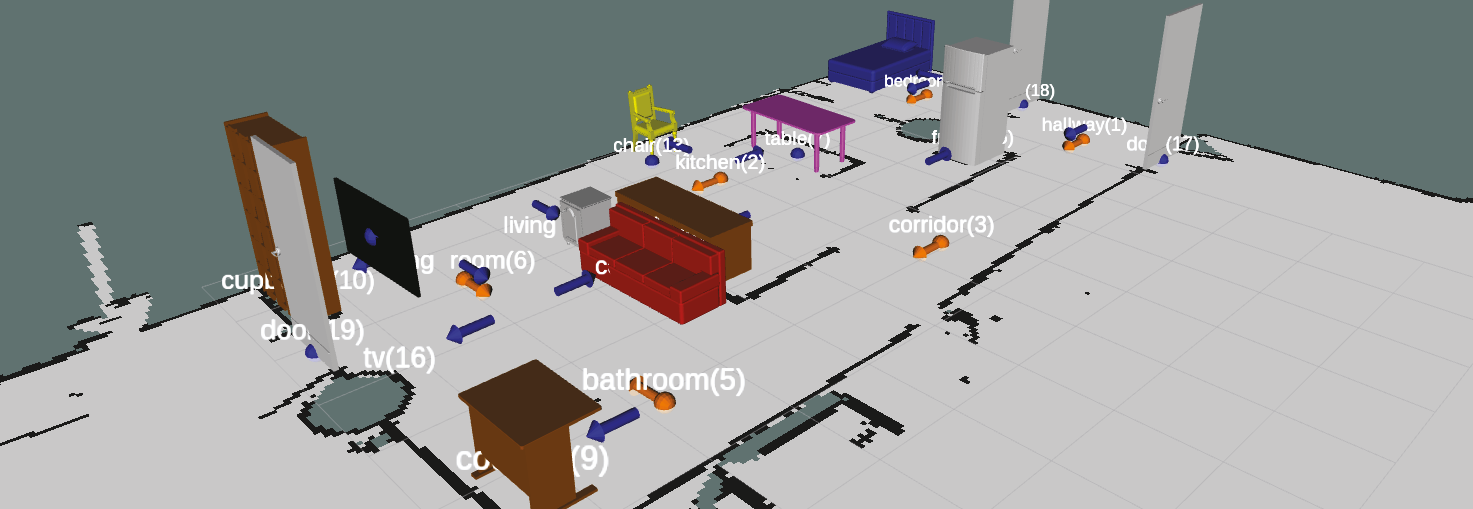
Environment representation directly in Rviz
Our website : https://walkingmachine.ca
Facebook : https://www.facebook.com/WalkingMachine/
Flick for more pictures : https://www.flickr.com/photos/walkingmachine/albums
More informations to come