



iRobot Rooma 530 Robot
![]() This really was just built to learn how to program C# robotics applications. A goal is to have some type of object tracking via the webcam, currently it uses just the roomba standard sensors for navigation. Outdoors I have a GPS module that I will be testing in a local tennis court once summer comes back and the snow is gone....
This really was just built to learn how to program C# robotics applications. A goal is to have some type of object tracking via the webcam, currently it uses just the roomba standard sensors for navigation. Outdoors I have a GPS module that I will be testing in a local tennis court once summer comes back and the snow is gone....
This is a picture of the SCI control cable, it connects to a standard serial port TTL 5V, (uses a max232 for the PC connection), and has one special control line to wake up the roomba.

The next picture shows me making a template from lexan to hold the CPU, HDD, and various other components.
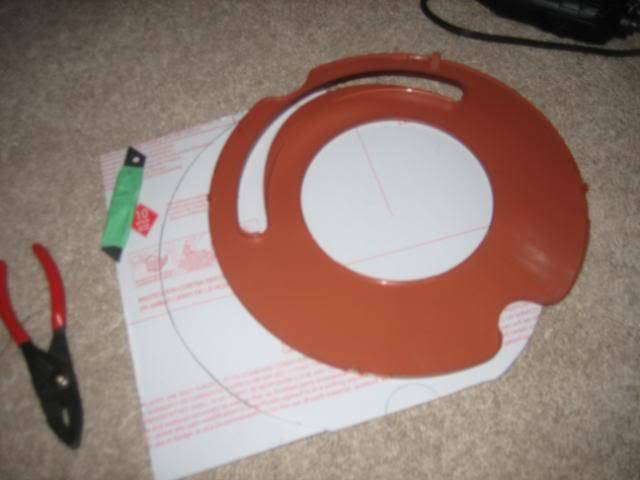
Lexan cut into a roomba shape....
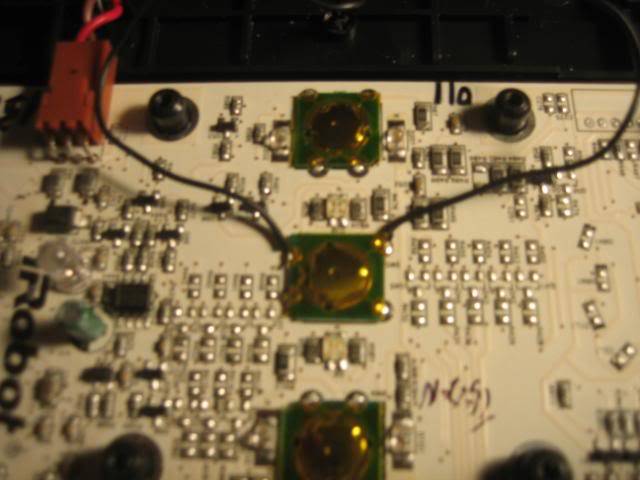
This is a power wire added to a remote switch as there is no longer access to the main top power button. I will actaully be adding a small cable assebly to bring out the dock, clean, demo and lights to a control board ontop of the robot.
![]()
Guenuine Microsoft XP Professional COA, ;)

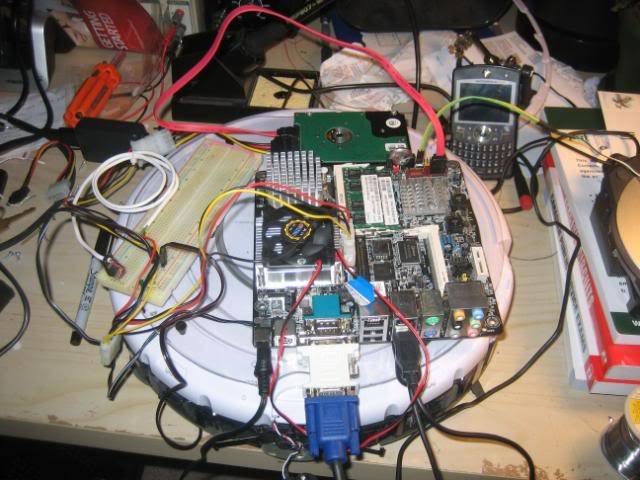
Test fitting all the components before final assembly...
Completed robot... see youtube video of its first power on and run...
![]()

Got some basic object tracking working, set to keep and follow a red object at a specified distance.
![]()
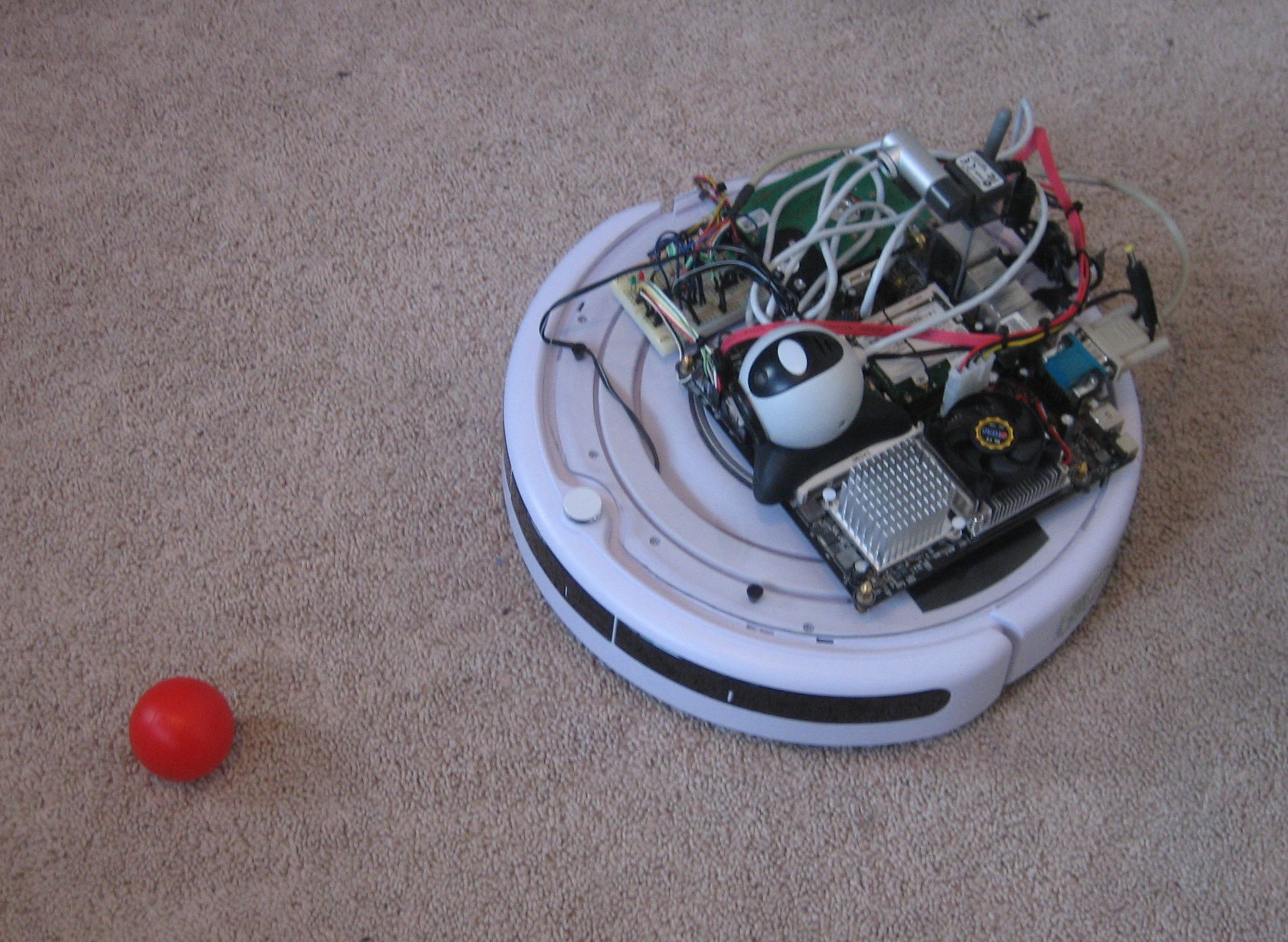
It roomba's around the house... :)
- Actuators / output devices: 2 drive motors
- Control method: autonomous or remote over C# application
- CPU: Intel Centrino Core 2 Duo 2.0Ghz, 2GB DDR2 Ram, DVI, HD Audio, 2 x Serial, 120GB HDD, 4 USB
- Operating system: Windows XP Pro
- Power source: roomba IPS power supply, auto return to base charge station
- Programming language: C#
- Sensors / input devices: roomba sensors, color windows camera
- Target environment: indoor, outdoor on smooth tennis courts etc